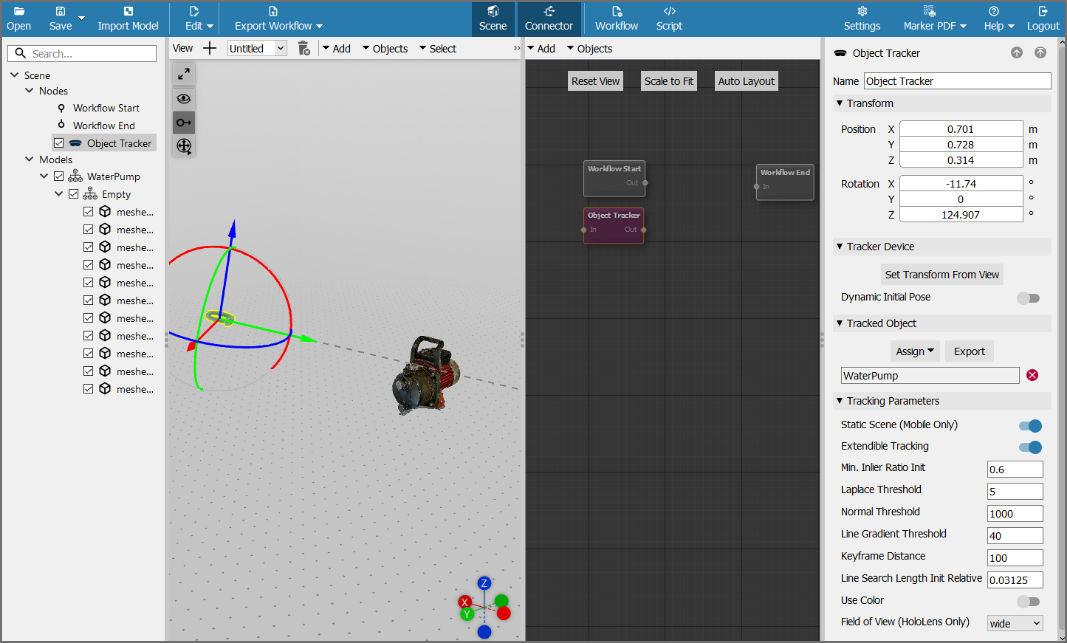
Nota: Os modelos 3D adicionados em uma cena não são visíveis no aplicativo Spatial Workplace por padrão. Para tornar o modelo inteiro ou certas partes dele visíveis, adicione um nó de estado de cena ao fluxo de trabalho.
Vista do conector
Para acessar a visualização do conector, clique em Conector no menu superior do editor. O painel conector é aberto ao lado da cena principal.
Na visualização do conector, as referências espaciais e os pinos do fluxo de trabalho podem ser vistos como nós em uma representação 2D de suas conexões. Além de referências espaciais, pinos e pinos de teste, dois outros tipos específicos de nós podem ser adicionados por meio do conector: nós de estado de cena e nós de condição.
Nós de estado da cena
Um nó de estado de cena executa uma modificação na cena do fluxo de trabalho. Há três tipos diferentes de modificações em um único nó:
- Interactable: O usuário ganha a capacidade de mover um modelo ou peça selecionada dentro do fluxo de trabalho.
- Visível: O modelo ou peça selecionada torna-se visível para o usuário.
- Redefinir transformação: Se o modelo ou peça selecionada tiver sido movida de seu local original, isso será desfeito e redefinido para seu estado padrão.
Para alterar a visibilidade e adicionar um nó de estado de cena:
- Abra a visualização do conector e clique em Adicionar > nó de estado da cena.
- Clique no nó para selecioná-lo e, à direita, clique em Adicionar modificador de cena > Visível.
3. Clique em Adicionar destinos para abrir a tela de seleção e selecione as partes do modelo para tornar visível.
4. Para tornar todo o modelo visível, abra o explorador de cenas à esquerda, selecione o conjunto superior e pressioneEnter . O modelo selecionado agora é destacado na cena. Você também pode escolher apenas uma das partes para torná-la visível.
Nota: Fluxos de trabalho com elementos interactáveis são suportados apenas pelo HoloLens.
- No exemplo abaixo, o primeiro nó de estado da cena é adicionado entre a referência espacial e o pino 1. Isso significa que, quando o fluxo de trabalho for iniciado, esse estado de cena já será carregado antes que o pino 1 seja mostrado.
- Duas alterações são adicionadas a esse nó usando o botão Adicionar modificador de cena , tornando o destino da modificação interactável e visível. O usuário pode adicionar qualquer número de destinos a uma modificação.
- Neste caso, todo o modelo de "braço" foi selecionado para tornar todo o braço do robô visível e intratável. Em qualquer caso, a seleção de um nó de estado de cena destaca a parte que ele modifica na cena 3D.
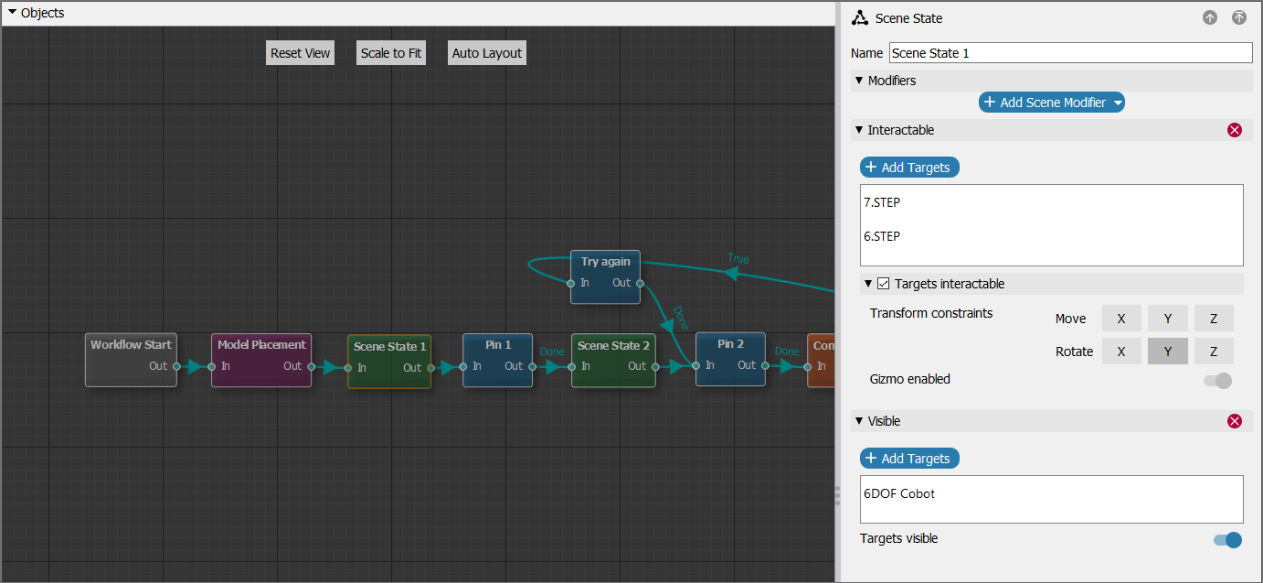
- Quando o pino 1 é carregado no aplicativo Spatial Workplace, o usuário pode ver o modelo e interagir com ele. Quando o usuário clica em Concluído no pino 1, o fluxo de trabalho passa pelo estado de cena 2.
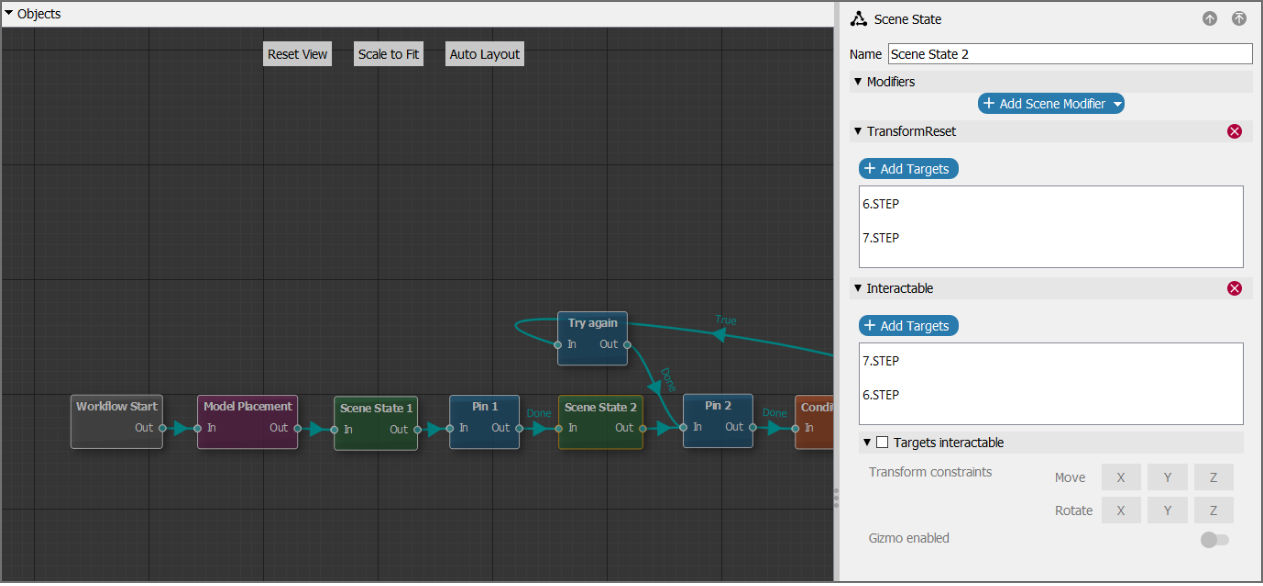
- Esse estado de cena contém um nó Redefinir Transformação com a parte do braço selecionada sendo o destino. Quando ativado, ele redefine a posição do modelo para seu estado original.
Nota: O destino ainda é interactável e visível após a redefinição. Para desativar a interação, outra alteração de estado de cena do tipo Interactable precisa ser adicionada com o mesmo destino e a caixa Targets interactable desmarcada (veja a imagem abaixo).
Nós de condição
- Um nó de condição permite que o usuário adicione uma condição ao caminho que pode ter um resultado verdadeiro ou falso. As conexões que saem de um nó de condição são, portanto, sempre do tipo Binary.
- Eles simbolizam o caminho que o usuário percorre se atender à respectiva condição.
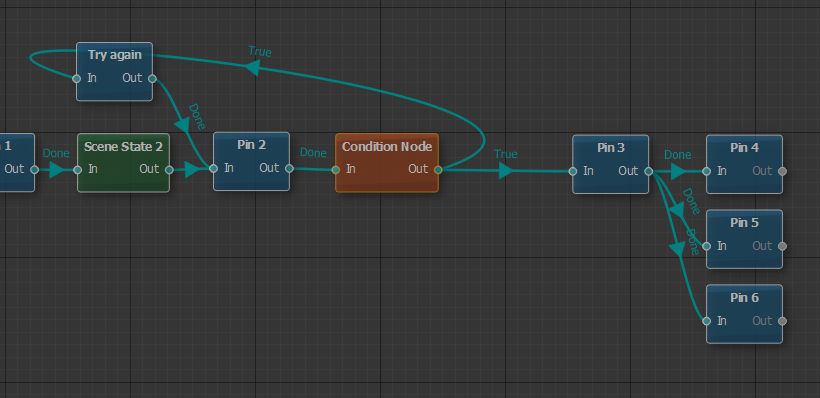
- No exemplo abaixo, um nó de condição é adicionado após o pino 2. A conexão entre o pino 2 e o nó de condição é do tipo Auto com um atraso de 0. Isso mantém os pinos anteriores ativos, o que significa que o nó de condição será ativado automaticamente quando o pino 2 estiver ativo e o pino 2 não desaparecer da visualização do usuário.
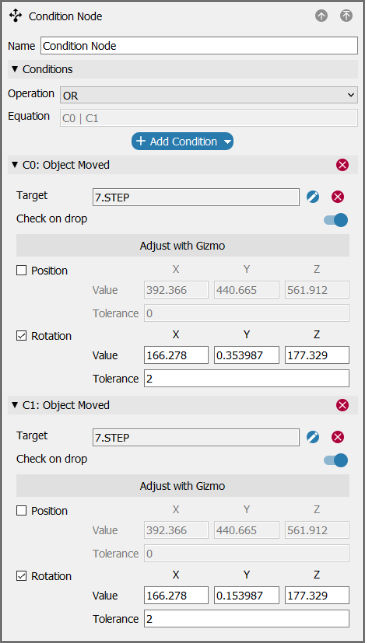
- Duas condições foram adicionadas ao nó, usando o botão Adicionar condição . Ambos são condições baseadas no movimento e têm o último elo do braço como alvo.
- A equação de condição é definida como "OU", o que significa que o usuário precisa executar pelo menos uma das condições para habilitar a conexão True.
- A primeira condição espera que o usuário gire a peça do modelo em 10 unidades ao longo do eixo Y (com tolerância de 2).
- A segunda condição espera que o usuário gire em -10 unidades ao longo do eixo Y (com uma tolerância de 2) - a mesma distância, mas na direção oposta.
- Esta unidade é a escolhida quando o modelo de destino foi importado. Além disso, a alternância Verificar no drop é ativada para acionar as conexões verdadeiras ou falsas somente quando o usuário libera o modelo e não constantemente. A imagem a seguir mostra o estado do menu do nó de condição para este exemplo.
- Ao executar o fluxo de trabalho no Spatial Workplace e atingir o pino 2, a condição será atendida se o usuário girar a última parte do braço robótico ao longo do eixo Y pelo valor definido. Assim que o usuário libera o modelo, a conexão True é ativada, o que habilita o pino 3.
- Se o usuário mover o modelo para qualquer outra posição, a conexão falsa é ativada e o pino "Tente novamente" aparece, que é adicionado lá convenientemente como um loop para trazer o usuário de volta ao pino 2 e permite que ele tente girar novamente a peça.
Nota: Um nó de cena do tipo Redefinir Transformação pode ser adicionado aqui para também redefinir o movimento incorreto da peça pelo usuário.
- O botão Check on drop pode ser desativado para facilitar que o usuário atinja a posição esperada do modelo. Quando o usuário começa a movê-lo, a condição é constantemente verificada e será marcada como verdadeira quando o usuário atingir o valor correto sem a necessidade de soltá-lo ou liberá-lo.
- No entanto, tenha em mente que, qualquer um deles será acionado automaticamente assim que o usuário iniciar o movimento se as conexões true e false forem usadas dentro da condição. Por esse motivo, recomendamos usar apenas uma das saídas do conector para um fluxo de trabalho padrão quando a alternância Verificar no local de alternância estiver desativada.