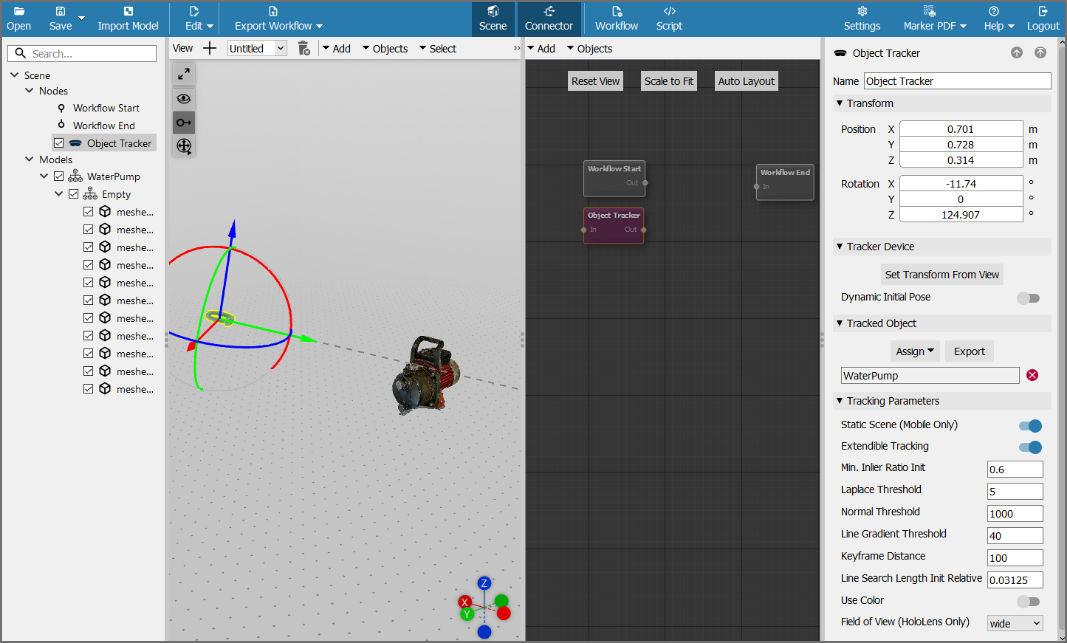
手記: シーンに追加された 3D モデルは、デフォルトでは Spatial Workplace アプリに表示されません。モデル全体またはその一部を表示するには、ワークフローにシーン ステート ノードを追加します 。
コネクタ ビュー
コネクタ ビューにアクセスするには、エディターの上部メニューで [コネクタ ] をクリックします 。コネクタ ウィンドウがメイン シーンの横に開きます。
コネクタ ビューでは、ワークフローの空間参照とピンを、接続の 2D 表現のノードとして表示できます。空間参照、ピン、クイズ ピンに加えて、コネクタを介して、シーン状態ノードと条件ノードの 2 つの特定のタイプのノードを追加できます。
シーン状態ノード
シーン状態ノードは、ワークフローのシーンで修正を実行します。1 つのノードには 3 種類の変更があります。
- インタラクト可能: ユーザーは、選択したモデルまたは部品をワークフロー内で移動できます。
- 目に見える: 選択したモデルまたは部品がユーザーに表示されます。
- 変換のリセット: 選択したモデルまたはパーツが元の場所から移動された場合、これは元に戻され、既定の状態にリセットされます。
可視性を変更し、シーンの状態ノードを追加するには:
- コネクタ ビューを開き、[Add > Scene State Node (シーン ステート ノードを追加)] をクリックします 。
- ノードをクリックして選択し、右側にある[Add Scene Modifier > Visible]をクリックします 。
3. [ターゲット の追加] をクリックして 選択画面を開き、表示するモデルのパーツを選択します。
4. モデル全体を表示するには、左側のシーンエクスプローラを開き、上部アセンブリを選択してを押しますEnter 。 選択したモデルがシーンでハイライト表示されます。また、パーツを 1 つだけ選択して表示することもできます。
注: 対話可能な要素を含むワークフローは、HoloLens でのみサポートされます。
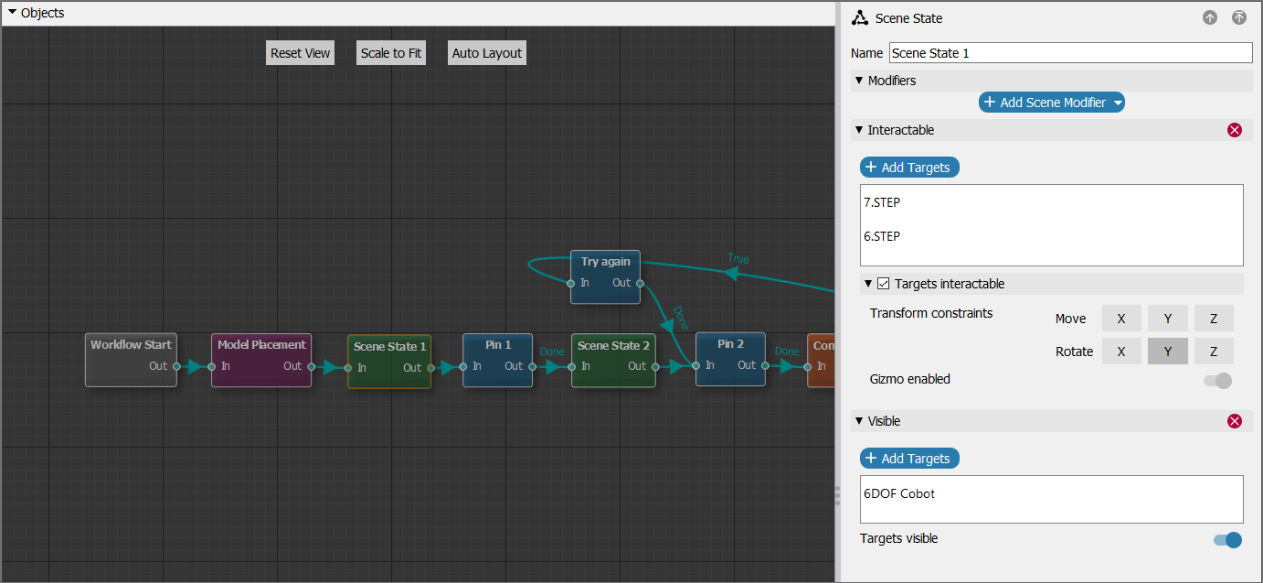
- 次の例では、最初のシーン ステート ノードが空間参照とピン 1 の間に追加されます。つまり、ワークフローが開始されると、このシーンの状態はピン 1 が表示される前に既に読み込まれます。
- Add Scene Modifier ボタンを使用してこのノードに 2 つの変更を追加し、修正のターゲットをインタラクティブかつ可視にします。ユーザーは、任意の数のターゲットをモディフィケーションに追加できます。
- この場合、ロボットアーム全体を可視化して扱いにくくするために、「腕」モデル全体を選択しました。いずれの場合も、シーン状態ノードを選択すると、3D シーンで修正されたパーツがハイライト表示されます。
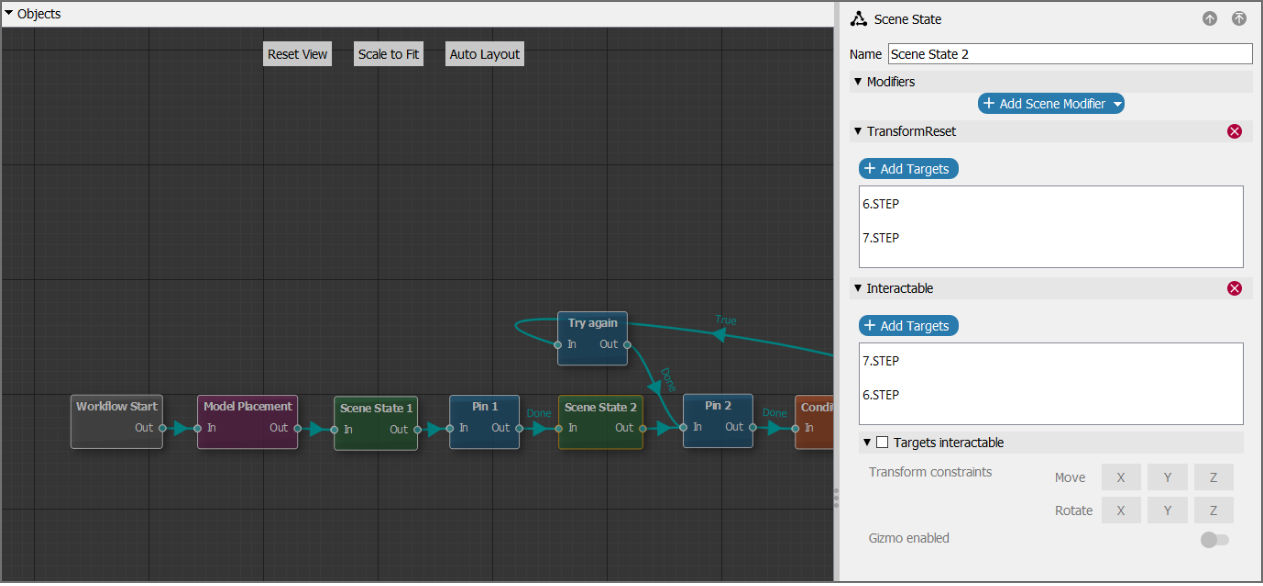
- ピン 1 が Spatial Workplace アプリに読み込まれると、ユーザーはモデルを表示して操作できます。ユーザーがピン 1 の [完了 ] をクリックすると、ワークフローはシーンの状態 2 を通過します。
- このシーン ステートには、選択した腕のパーツがターゲットとなる Reset Transform ノードが含まれています。有効にすると、モデルの位置が元の状態にリセットされます。
注: ターゲットはリセット後もインタラクト可能であり、表示されます。インタラクションを無効にするには、同じターゲットと Targets interactable ボックスをオフにして、Interactable タイプの別のシーン状態変更を追加する必要があります (下の画像を参照)。
条件ノード
- 条件ノードを使用すると、ユーザーは、trueまたはfalseの結果を持つ可能性のある条件をパスに追加できます。したがって、条件ノードから出力される接続は、常にバイナリ型になります。
- これらは、ユーザーがそれぞれの条件を満たした場合にたどるパスをシンボル化します。
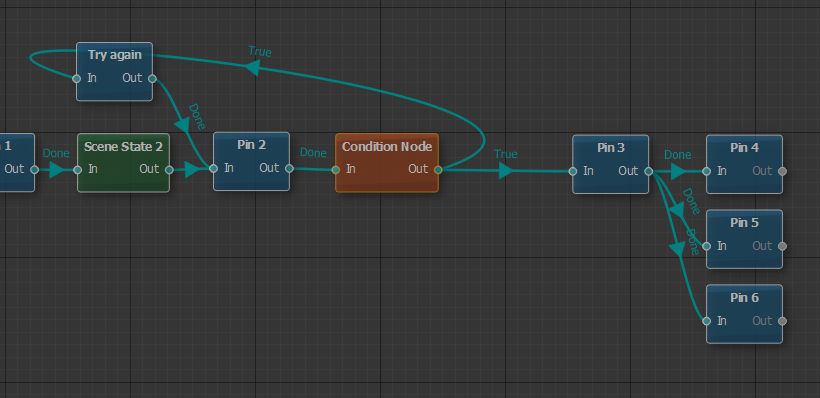
- 次の例では、ピン 2 の後に条件ノードが追加されています。ピン 2 と条件ノード間の接続は、遅延が 0 の Auto タイプです。これにより、前のピンがアクティブなままになり、ピン 2 がアクティブなときに条件ノードが自動的にアクティブになり、ピン 2 がユーザーのビューから消えることはありません。
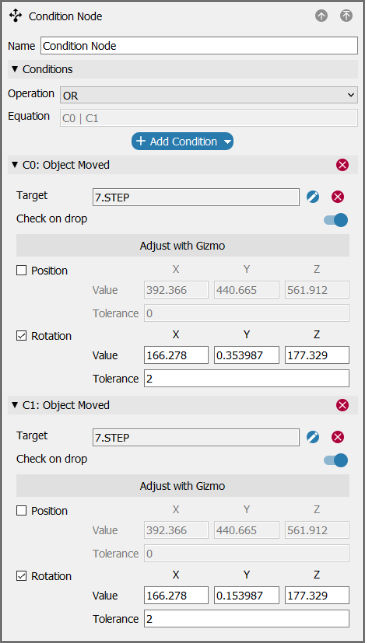
- [ 条件の追加 ] ボタンを使用して、2 つの条件をノードに追加しました。 どちらも動きに基づく条件であり、腕の最後のリンクをターゲットとしています。
- 条件式は「OR」に設定されており、これは、ユーザーがTrue接続を有効にするために、少なくとも1つの条件を実行する必要があることを意味します。
- 最初の条件では、ユーザーがモデル パーツを Y 軸に沿って 10 単位回転 (許容差 2) することを想定しています。
- 2 番目の条件では、ユーザーが Y 軸に沿って -10 単位 (許容誤差 2) 回転 (同じ距離で反対方向) を回転させることを想定しています。
- この単位は、対象モデルがインポートされたときに選択された単位です。さらに、 Check on drop トグルがアクティブになり、ユーザーがモデルを離したときにのみtrueまたはfalse接続がトリガーされ、常にトリガーされるわけではありません。次の図は、この例の条件ノード メニューの状態を示しています。
- Spatial Workplace でワークフローを実行し、ピン 2 に到達した場合、ユーザーがロボット アームの最後の部分を Y 軸に沿って定義された値だけ回転させると、条件が満たされます。ユーザーがモデルを離すと、True 接続がアクティブになり、ピン 3 が有効になります。
- ユーザーがモデルを他の位置に移動すると、False接続がアクティブになり、「再試行」ピンが表示され、ユーザーがピン2に戻り、パーツの回転を再試行できるようにするループとしてそこ に追加されます。
注: [トランスフォームをリセット](Reset Transform)タイプのシーン ノードをここに追加して、ユーザによるパーツの誤った動きをリセットすることもできます。
- Check on drop トグルを非アクティブにすると、ユーザーはモデルの期待される位置を簡単に達成できます。ユーザーが移動を開始すると、条件は常にチェックされ、ユーザーが正しい値に達すると、ドロップしたり離したりしなくても true とマークされます。
- ただし、条件内で真の接続と偽の接続の両方が使用されている場合、ユーザーが移動を開始すると、どちらかが自動的にトリガーされることに注意してください。このため、[ Check on drop ] トグルが無効になっている場合は、標準ワークフローのコネクタ出力の 1 つだけを使用することをお勧めします。