Après avoir chargé un modèle, vous pouvez ajouter des informations au workflow. Pour définir l’emplacement où le modèle sera affiché ultérieurement dans l’application Spatial Workplace, une référence spatiale doit être ajoutée au workflow.
Il existe trois types de références :
- Marqueurs
- Traqueurs d’objets
- Placement du modèle
Remarque : La combinaison de différents types de références spatiales dans un workflow n’est actuellement pas prise en charge.
Marqueurs
Un marqueur est utilisé pour positionner les informations qui doivent être affichées dans un flux de travail à l’endroit souhaité sur le composant réel. Pour cela, il faut ajouter au moins un marqueur virtuel dans l’éditeur où le marqueur réel sera par rapport au composant réel. Différents appareils utilisent différents types de marqueurs. Le modèle virtuel est ensuite chargé dans Spatial Workplace en fonction de la position numérisée du marqueur.
Il existe les types de marqueurs suivants :
- Marqueur ArUco : Ce type de marqueur est destiné à être utilisé avec des appareils mobiles (iOS et Android). La taille du marqueur peut être ajustée par l’utilisateur et peut être comprise entre 1 et 99 cm. En règle générale, il convient d’utiliser des marqueurs d’une taille de 10 cm (12 cm avec bordures) ou de 15 cm (18 cm avec bordures), mais l’utilisateur a la possibilité de sélectionner la taille qui convient le mieux au composant respectif.
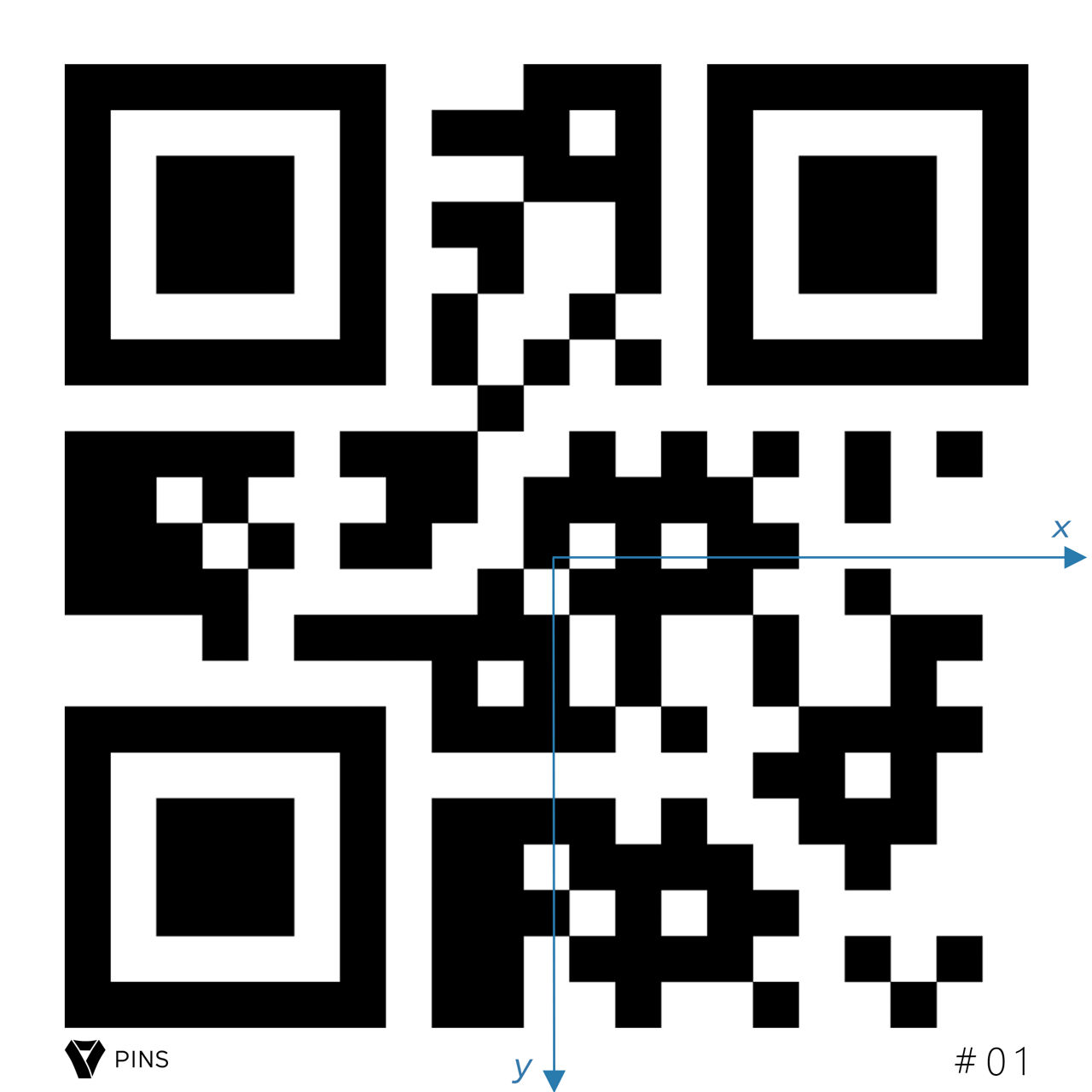
- Marqueur de code QR : Ce type de marqueur est destiné à être utilisé avec un HoloLens 2. Encore une fois, la taille peut être ajustée par l’utilisateur. La valeur par défaut proposée est de 15 cm (17 cm avec bordures).
Remarque : Pour un suivi correct, il est nécessaire d’imprimer le marqueur dans la même taille que celle qui a été ajoutée dans l’éditeur spatial.
Pour ajouter un marqueur à votre modèle :
- Cliquez sur Ajouter en haut.
- Choisissez un marqueur ArUco ou un marqueur de code QR en fonction de vos besoins.
- Cliquez sur la surface du modèle à l’endroit où vous souhaitez le placer. Les autres options/boutons de l’éditeur sont désactivés jusqu’à ce que vous placiez le marqueur.
- Pour modifier la position du marqueur sur la surface du modèle, sélectionnez-le et cliquez sur Objet > Accrochage dans le menu supérieur ou appuyez sur
Sle clavier. - Modifiez la position et la rotation des marqueurs indépendamment de la surface du modèle à l’aide des gizmos de transformation ou du menu Transformation à droite.
6. Sur le côté droit, vous pouvez modifier la référence du marqueur (ID et taille).
Note: Le marqueur virtuel utilisé dans l’éditeur doit être le même que le marqueur réel qui est placé sur le composant réel lors de l’utilisation de Spatial Workplace, alors assurez-vous que l’ID du marqueur correspond. Il est important d’imprimer le bon marqueur et de le placer dans la même position, à la fois virtuellement dans l’éditeur et sur le composant réel.
Tous les marqueurs peuvent être téléchargés en cliquant sur Marqueur PDF dans le menu supérieur. Pour les modèles de grande taille, il est recommandé d’ajouter plusieurs marqueurs pour faciliter le suivi avec HoloLens 2. Un grand modèle est un modèle pour lequel, pour voir toutes les épingles, l’utilisateur doit déplacer son point de vision de plus de 90 degrés par rapport à la position du marqueur d’origine. Si c’est le cas, ajoutez un marqueur supplémentaire à chaque section (c’est-à-dire côté) de votre composant réel. Chaque marqueur aide l’appareil à recalibrer la position des broches, assurant ainsi leur placement correct.
Traqueurs d’objets
Lors de l’utilisation de trackers d’objets, l’objet réel est utilisé pour calculer la position des informations à afficher dans un flux de travail à l’endroit souhaité. Les trackers d’objets peuvent être utilisés dans des flux de travail qui seront affichés sur des appareils HoloLens 2, iOS et Android.
Pour ajouter un outil de suivi d’objets à votre modèle :
- Cliquez sur Ajouter > suivi d’objets dans le menu en haut de la scène 3D.
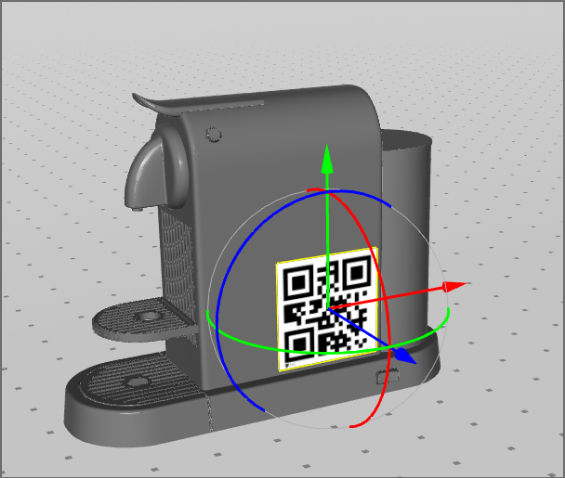
- Vous verrez un hologramme rouge de lunettes intelligentes (vous devez effectuer un zoom arrière à l’aide de la molette de défilement de votre souris). Cet hologramme montre comment l’objet sera perçu à travers des lunettes intelligentes.
3. La position du suivi d’objet par rapport au modèle dans la scène représente la position et la distance à laquelle l’utilisateur devra positionner son appareil pour numériser l’objet réel tout en jouant au flux de travail dans Spatial Workplace.
4. Ajoutez le suivi d’objets. Il est maintenant positionné automatiquement à l’endroit où se trouve la caméra de la scène 3D (c’est-à-dire la perspective dans laquelle l’utilisateur regarde actuellement le modèle dans la scène 3D).
Note: À l’aide de la souris, l’utilisateur peut faire pivoter la scène pour mieux la voir sous différents angles.
5. Utilisez le gizmo sur le tracker d’objets pour affiner ses positions ou déplacer la caméra.
6. Facultatif : Cliquez sur Définir la transformation à partir de la vue dans le menu de droite pour le déplacer à nouveau vers votre perspective de visualisation.
Note: Il est important que le traqueur d’objets se trouve à une distance raisonnable du modèle et que la ligne qui en sort pointe vers le modèle.
⇒ Après avoir téléchargé votre flux de travail, testez la perspective et la distance de numérisation sur un appareil de visualisation et affinez-les dans l’éditeur. Avec cela, il sera garanti pour l’utilisateur final d’avoir une meilleure expérience de numérisation.
Note: La couleur rouge de l’hologramme des lunettes intelligentes signifie qu’il n’y a pas de fichier .obj joint. Le fichier .obj facilite le suivi des objets à partir de VisionLib pour suivre le composant réel.
7. Pour créer un fichier .obj à partir de la scène, sélectionnez l’hologramme rouge
8. Allez dans les paramètres sur la droite.
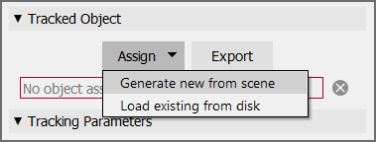
9. Cliquez sur Attribuer > Générer une nouvelle scène à partir d’une scène sous Objet suivi
10. Facultatif : L’utilisateur peut également enregistrer le fichier .obj sur son ordinateur en cliquant sur Exporter et en enregistrant le fichier.
Note: Quel que soit le format de modèle importé dans Spatial Editor, un fichier .obj doit être généré à partir de la scène ou fourni à partir du disque.
11. Maintenant, l’hologramme du traqueur d’objets dans la scène 3D devrait changer de couleur en vert.
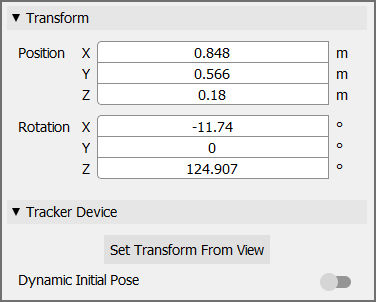
12. Facultatif : si des pièces sont masquées ou déplacées du modèle dans Spatial, le fichier .obj doit être régénéré pour inclure ces modifications dans votre flux de travail. Pour pouvoir ajuster la position et la rotation du suivi initial lors de l’utilisation de l’application Workplace, activez l’option Pose initiale dynamique .
Note: Pour le suivi d’objets dans HoloLens 2, l’échelle de la .obj doit être en mètres. Lors de la génération de l'.obj à partir de la scène, Spatial s’en assurera automatiquement. Toutefois, si l’utilisateur importe un .obj existant avec une licence VisionLib à partir d’un disque, il est de la responsabilité de l’utilisateur de s’assurer que la balance est en mètres. Les autres appareils n’ont pas cette limitation.
13. Modifiez la position et la rotation du suivi d’objet à l’aide du menu de droite.
14. Cliquez sur Définir la transformation à partir de la vue. Le suivi d’objet est automatiquement déplacé vers la position et le point de vue de la scène 3D.
15. Enfin, vous pouvez modifier les valeurs des paramètres de suivi (expliqués ci-dessous) pour améliorer le suivi d’un objet spécifique.
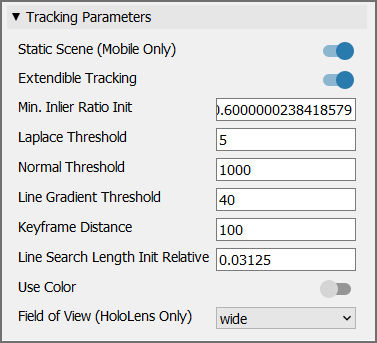
Note: L’un de ces paramètres est la scène statique, que l’utilisateur peut désactiver si la scène sur laquelle il travaille est dynamique. Cette fonctionnalité n’est actuellement disponible que sur les appareils mobiles.
Note: Les valeurs par défaut sont des paramètres généraux choisis pour fonctionner correctement avec la plupart des objets.
Voici une liste de tous les paramètres de suivi disponibles :
- Pose initiale dynamique : Lorsque cette option est activée, l’utilisateur peut définir dynamiquement le point de vue de suivi initial pendant l’exécution.
- Suivi continu (mobile uniquement) : Si cette option est activée (par défaut), le traqueur d’objets aura un suivi d’objet continu pour les appareils mobiles. Il est plus adapté aux objets qui peuvent être déplacés ou tournés pendant la tâche tout en conservant leur forme. Le suivi non continu suit uniquement l’objet au début de la tâche, puis poursuit le suivi à l’aide de SLAM. Le suivi non continu est plus adapté aux objets qui ne sont pas déplacés ou pivotés pendant la tâche et qui changent de forme (par exemple, des pièces sont ajoutées ou supprimées).
- Suivi extensible : Si cette option est activée (par défaut), le suivi basé sur un modèle sera étendu avec un suivi basé sur SLAM. Cela permet de poursuivre le suivi même si le modèle n’est plus visible dans l’image de la caméra. L’utilisateur doit effectuer une danse SLAM, c’est-à-dire traduire et faire pivoter la caméra afin qu’il y ait suffisamment de ligne de base pour la reconstruction des caractéristiques.
- Min. Inlier Ratio Init : Seuil de validation du suivi lors de l’initialisation. La plage de valeurs s’étend de 0,5 à 0,9, 0,6 étant la valeur par défaut. Des valeurs plus élevées sont recommandées si le modèle linéaire correspond parfaitement à l’objet réel sans occlusion. Cependant, ils ne correspondent généralement pas parfaitement, c’est pourquoi une valeur inférieure fonctionne mieux.
- Seuil de Laplace : Seuil de création du modèle linéaire (mm). La plage de valeurs s’étend de 0,0001 à 100000, 5 étant la valeur par défaut. Cela spécifie la profondeur minimale entre deux pixels voisins à reconnaître comme une arête.
- Seuil normal : Seuil de génération du modèle linéaire. La plage de valeurs s’étend de 0,0001 à 1000, 1000 étant la valeur par défaut. Cela spécifie la différence normale minimale entre deux pixels voisins nécessaire pour être reconnu comme une arête. Habituellement, il est défini sur une valeur élevée, car les lignes normales ne peuvent pas être reconnues de manière très fiable. Cependant, pour certains modèles, il peut être judicieux d’utiliser une valeur inférieure.
- Seuil de dégradé de ligne : Seuil pour les candidats à l’arête dans l’image. La plage de valeurs s’étend de 0 à 256, 40 étant la valeur par défaut. Les valeurs élevées ne considéreront que les pixels à contraste élevé comme candidats, tandis que les valeurs faibles prendront également en compte les autres pixels. Il s’agit d’un compromis. S’il y a trop de candidats, l’algorithme peut choisir les mauvais pixels. S’il n’y a pas assez de candidats, le modèle linéaire risque de ne pas coller à l’objet dans l’image.
- Distance de l’image clé : Distance minimale entre les images clés (mm). La plage de valeurs s’étend de 0,001 à 100000, 100 étant la valeur par défaut. Le modèle de ligne n’est généré que pour certaines images-clés. Des valeurs plus élevées améliorent les performances, mais s’accompagnent d’une précision plus faible (et vice versa).
- Longueur de la ligne d’initialisation relative : Longueur des lignes de recherche orthogonales (en pourcentage) par rapport à la résolution minimale lors de l’initialisation et du suivi. La plage de valeurs s’étend de 0,00625 à 1, 0,03125 étant la valeur par défaut. Le suivi basé sur un modèle projette le modèle de ligne 3D dans l’image de la caméra et recherche les pixels de bord orthogonaux aux lignes projetées.
- Utiliser la couleur : Cette option est désactivée par défaut. Si cette option est activée, les bords colorés sont mieux distingués lors du suivi. Il n’est utile que pour les objets avec des bords colorés. Il peut augmenter la qualité du suivi mais nécessite plus de puissance de traitement.
- Champ de vision (HoloLens 2 uniquement) : Un champ de vision plus grand fait paraître l’objet plus petit lors de la capture d’image. Il est recommandé d’utiliser 'large' pour les gros objets et 'étroit' pour les petits.
Remarque : Le suivi d’objet doit être activé par TeamViewer/VISCOPIC. Une licence supplémentaire par modèle ou par appareil est requise (fournisseur de logiciel externe - VisionLib)
Placement du modèle
Le placement du modèle utilise la position de l’utilisateur lors du démarrage de Spatial Workplace pour positionner tous les modèles et les broches connectés à la référence spatiale.
Il peut être utilisé dans les flux de travail qui seront affichés sur les appareils HoloLens 2, iOS et Android.
Pour ajouter une référence spatiale de placement de modèle :
- Cliquez sur Ajouter > placement du modèle en haut de la scène 3D. Les gizmos permettent des mouvements uniquement le long des axes vert et rouge et une rotation autour de l’axe bleu. Cette restriction a pour but de conserver la référence de placement du modèle sur le même plan.
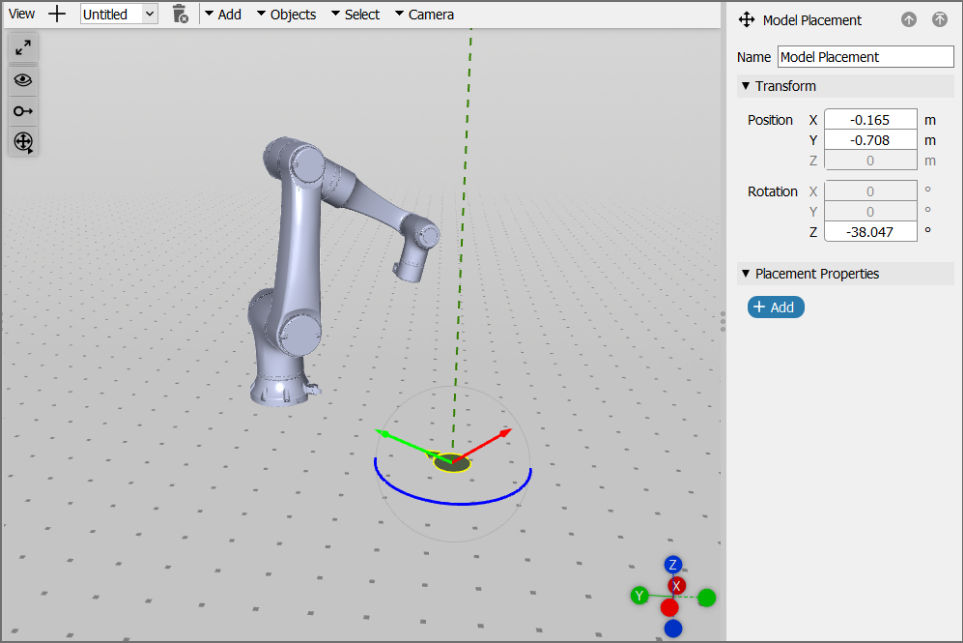
2. La flèche verte symbolise la direction de la vue de l’utilisateur. L’utilisateur peut choisir quels modèles sont positionnés en fonction de cette référence dans le menu de droite. Lors du démarrage du flux de travail dans Spatial Workplace, les modèles sélectionnés et les broches connectées sont positionnés par rapport à la direction d’affichage de l’utilisateur lorsqu’il démarre l’application Spatial Workplace.
Visibilité du modèle : À la différence des broches connectées à une référence spatiale, les modèles ne sont pas visibles par défaut. Pour les rendre visibles lors de la lecture du workflow, vous devez :
Recommandations de suivi
Tailles des marqueurs
La taille du marqueur peut influer sur la précision avec laquelle les informations sont affichées dans Spatial Workplace, ainsi que sur la distance à partir de laquelle le marqueur peut être scanné. L’éditeur permet à l’utilisateur de choisir une taille de marqueur comprise entre 1 et 99 cm.
Sur un appareil HoloLens, un marqueur de ligne de front peut être numérisé confortablement à une distance 50 fois plus grande que la taille du marqueur. Par exemple, un marqueur de 10 cm peut être scanné jusqu’à une distance d’environ 5 mètres dans de bonnes conditions d’éclairage. Envisagez d’augmenter la taille du marqueur en cas de faible luminosité. Sur les appareils iOS et Android, Frontline un marqueur peut être scanné confortablement à une distance 5 fois plus grande que la taille du marqueur (par exemple, un marqueur d’une taille de 10 cm à une distance de 50 cm).
Remarque : En général, la taille minimale recommandée pour un marqueur est de 10 cm. Cependant, cela peut varier en fonction des conditions d’éclairage, de la mise au point de l’appareil photo et de la distance par rapport à l’appareil photo du scanner.
Spatial Workplace positionne le contenu d’un workflow par rapport au marqueur numérisé.
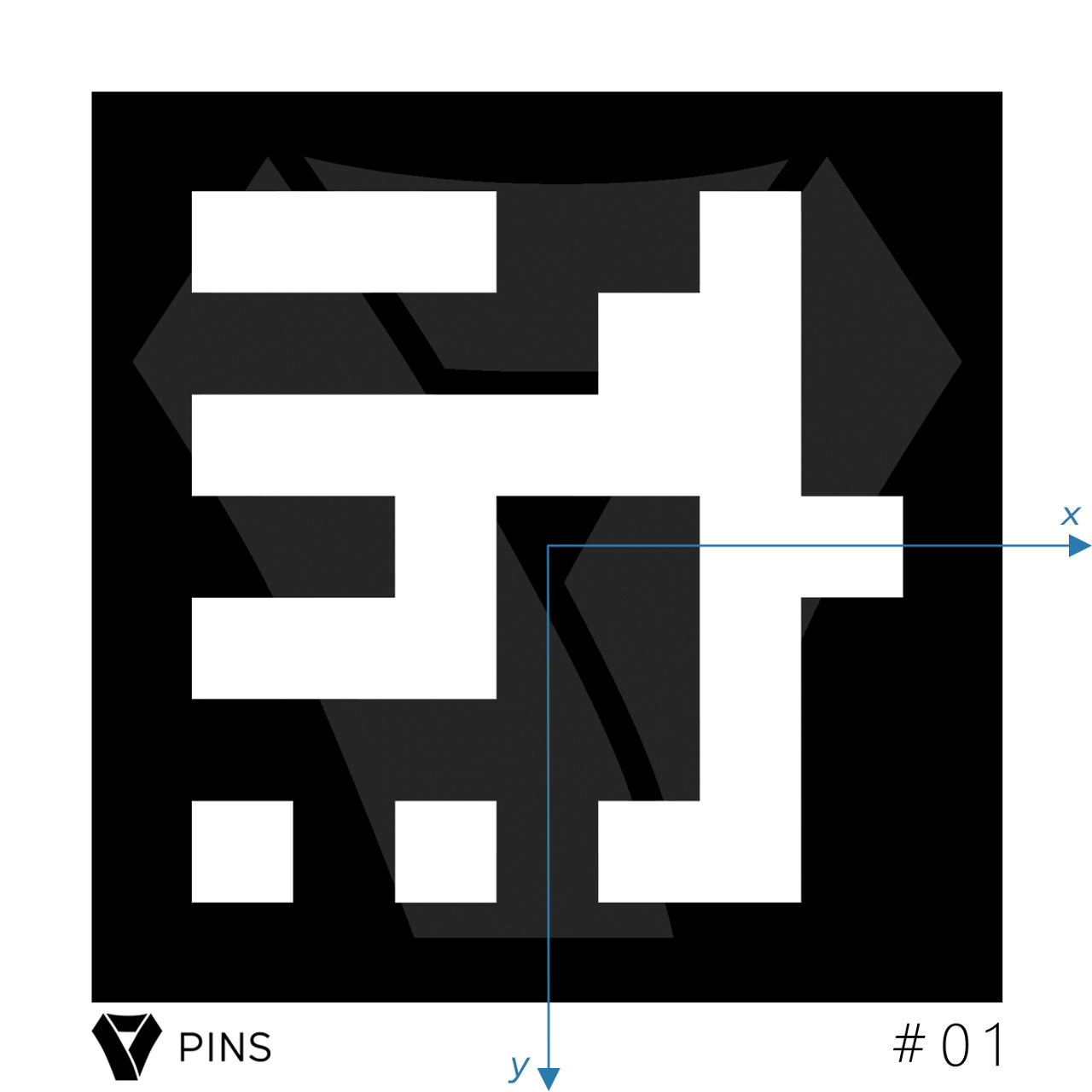
Seuls les axes x et y sont représentés dans cette représentation 2D. Spatial Workplace, cependant, utilise également le troisième axe pour cartographier la position 3D exacte. Le logiciel utilise le centre du marqueur par rapport à sa hauteur et à sa largeur pour déterminer une transformation 3D.
En plaçant un marqueur sur le composant réel dont la taille est différente de celle du composant numérique ajouté au workflow dans l’éditeur, l’utilisateur est confronté à la possibilité de définir le point de départ de ce système de coordonnées spatiales au mauvais endroit. Cela peut compromettre le positionnement de toutes les informations dans le flux de travail.
Règle générale: Une taille de 10 cm pour les marqueurs ArUco et de 15 cm pour les marqueurs de code QR est suffisante pour la plupart des cas sur les appareils respectifs. Cependant, les conditions d’éclairage, la mise au point de l’appareil photo et la distance par rapport à l’appareil photo du scanner peuvent avoir un impact significatif. Pensez à augmenter la taille de vos marqueurs en cas de problème.
Remarque : Les quatre coins du marqueur doivent être clairement visibles pour l’appareil photo du scanner et être aplatis à la position exacte définie dans l’éditeur. Les boucles et les plis du marqueur peuvent compromettre le bon positionnement des épingles.
Recommandations de paramètres en conditions réelles
Il est important de prendre soin de toutes les variables de suivi pour positionner les broches à leur emplacement exact et minimiser le décalage. Il s’agit notamment des caractéristiques physiques du marqueur, de l’environnement et de l’appareil utilisé pour exécuter l’application Spatial Workplace. Pour obtenir les meilleurs résultats possibles, suivez les recommandations ci-dessous pour augmenter l’efficacité du suivi.
Conditions du marqueur :
- Utilisez un marqueur dont la taille et le numéro d’identification sont corrects, tels que définis dans l’éditeur.
- Les quatre coins doivent être clairement visibles pour l’appareil photo du scanner, y compris l’espace blanc qui l’entoure.
- Le marqueur doit toujours être aplati et placé dans la position exacte sur l’objet réel, sans boucles, déchirures ou plis.
- Les surfaces réfléchissantes qui recouvrent le marqueur peuvent compromettre le suivi (par exemple, le verre ou le laminage).
- Les marqueurs doivent toujours être scannés à partir d’un angle de 90 degrés par rapport à la surface sur laquelle ils sont placés (c’est-à-dire que la caméra doit regarder directement l’objet/le marqueur). Le balayage sous différents angles peut influencer le positionnement des broches.
Conditions environnementales :
- Le nombre d’entités dans l’environnement et votre composant influencent le suivi. Une fois le marqueur scanné et la position d’origine définie, le système de suivi de l’appareil prend le contrôle du maintien du contenu à sa place. Le nombre d’entités de votre paramètre augmente l’efficacité du suivi des appareils. Les bonnes caractéristiques incluent les coins et le contraste visibles sur le composant lui-même et entre le composant et son environnement.
- La pièce doit être bien éclairée. Les caméras des appareils ont généralement des capacités plus faibles pour recevoir la lumière par rapport à nos yeux. Assurez-vous qu’il y a suffisamment de lumière dans la pièce pour garantir les meilleurs résultats de suivi possibles. Cependant, évitez également les environnements trop lumineux.
- Les surfaces réfléchissantes doivent être évitées, en particulier pour placer des marqueurs, des épingles et d’autres contenus.
- Des mouvements brusques lors de l’exécution d’une tâche peuvent entraîner des dérives dans la position du contenu. Maintenez une position stable de l’appareil pendant l’exécution de la tâche.
- Dans les grands espaces, plus une épingle est éloignée de la position du marqueur scanné, plus le risque de dérives indésirables dans le positionnement du contenu est élevé. Cela est dû à l’intensification des petites imprécisions dans le suivi des marqueurs et à la quantité de mouvement nécessaire entre le marqueur et l’emplacement du contenu. Pour minimiser ce problème, consultez la section « Ajout de marqueurs supplémentaires pour améliorer le suivi » ci-dessous.
Remarque : En fonction de la taille de votre composant, des marqueurs supplémentaires peuvent être nécessaires. En raison des capacités de suivi limitées de certains appareils, il peut s’avérer nécessaire d’ajouter plusieurs marqueurs pour différentes sections du modèle. De cette façon, le logiciel Spatial Workplace peut retracer la position des broches pour les placer correctement. La fonction de repositionnement de la tâche peut être utilisée à tout moment lors de l’exécution d’une tâche à re-tracker.
Conditions de l’appareil :
- Appareils HoloLens
- Les appareils HoloLens nécessitent une visière propre et des capteurs exempts d’objets gênants.
- Regarder autour de la pièce ou se promener dans la zone augmente la capacité de l’appareil à suivre le réglage de la pièce. Le fait d’avoir de nombreuses personnes constamment en mouvement dans la pièce peut compromettre le suivi.
- Les utilisateurs ont des distances interpupillaires (IPD) différentes. Des valeurs IPD non calibrées sur l’appareil peuvent compromettre l’expérience AR. Cet article de Microsoft explique comment utiliser une application d’étalonnage pour personnaliser l’IPD de votre appareil.
- Appareils iOS et Android
- Des objectifs de caméra transparents sont nécessaires pour un suivi correct.
- La mise au point automatique peut compromettre le positionnement des broches.
Redémarrage du suivi pendant une tâche
S’il y a une dérive dans la position de votre contenu au milieu de l’exécution d’une tâche, il suffit de scanner à nouveau un marqueur. Sélectionnez Repositionner la tâche dans le menu des tâches de l’appareil et scannez le marqueur lorsque vous y êtes invité. Après avoir scanné à nouveau le marqueur, la tâche reprendra là où vous l’aviez laissée.
Menu des tâches
Sur les appareils mobiles (iOS et Android), le menu des tâches reste toujours dans le coin supérieur gauche de l’écran avec une icône qui comporte trois lignes. Sur HoloLens 2, le menu des tâches s’affiche lorsque vous levez la main gauche devant l’appareil. Il est également possible de redémarrer le suivi à l’aide de la commande vocale « Repositionner la tâche ».
Ajout de marqueurs supplémentaires pour améliorer le suivi
Les dispositifs de RA ont une meilleure capacité de suivi lorsque toutes les broches sont situées plus près de la référence spatiale (marqueur) et n’obligent pas l’utilisateur à s’éloigner ou à faire de grands virages par rapport à la position d’origine. Lorsque le contenu est éloigné de la référence spatiale initiale, les petites imprécisions de suivi du balayage des marqueurs apparaissent plus grandes, car elles sont potentialisées par la distance. En plus de cela, un mouvement excessif de l’utilisateur peut entraîner des dérives supplémentaires dans la position du contenu.
C’est la raison pour laquelle nous vous recommandons de créer différents marqueurs pour différentes « sections » du composant réel, comme le montre cet exemple :
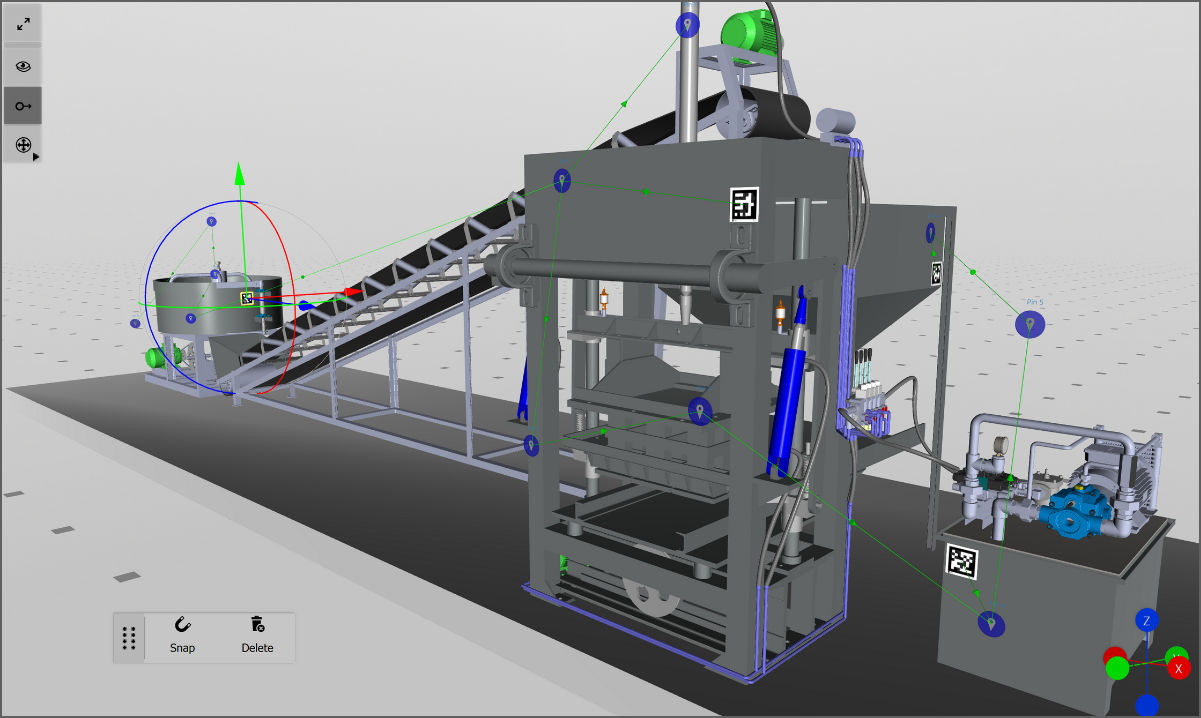
Lors de l’exécution d’une tâche, l’utilisateur est en mesure de scanner de nouveaux marqueurs dans chaque section du composant et l’appareil peut recharger les positions du contenu et placer les broches à leurs positions correctes. Pour plus de détails, consultez la section « Redémarrage du suivi pendant une tâche » ci-dessus.
Lorsque vous ajoutez plusieurs marqueurs à un projet dans l’éditeur, assurez-vous que les marqueurs supplémentaires sont connectés aux épingles du workflow. Dans l’éditeur, l’utilisateur peut les connecter dans le connecteur 2D. Cela permet à l’utilisateur de décider si différents marqueurs peuvent commencer la tâche à partir de différentes épingles ou si les marqueurs seront ajoutés entre les broches, ce qui obligera l’utilisateur à scanner ce marqueur lorsqu’il atteindra cette partie de la tâche. N’hésitez pas à utiliser des identifiants de marqueurs différents ou le même ID de marqueur pour ces marqueurs supplémentaires.
Recommandations supplémentaires
Veuillez prendre en compte les éléments suivants pour garantir une expérience de suivi AR transparente, améliorer la qualité du suivi et éviter des problèmes tels que la natation AR et un positionnement incorrect :
- Très peu de caractéristiques optiques dans l’environnement réel : si l’environnement réel ne contient pas beaucoup de caractéristiques optiques (par exemple, un mur blanc uni avec de la texture), il peut être difficile pour les caméras de calculer les mouvements du casque ou de l’appareil mobile.
- Modèles/hologrammes 3D très complexes : une puissance de calcul élevée est nécessaire lors de la visualisation de modèles ou d’hologrammes complexes pour que tous les objets/pièces soient visibles, ce qui signifie qu’il reste moins de puissance de calcul pour le système de suivi AR.
- Pas d’étalonnage oculaire (pour les utilisateurs de HoloLens) : la meilleure expérience HoloLens peut être obtenue lorsque chaque utilisateur effectue un étalonnage oculaire sur l’appareil. Si le problème de « natation » persiste sur HoloLens 2, essayez d’exécuter l’étalonnage des yeux sur votre appareil. Pour en savoir plus sur l’étalonnage HoloLens, consultez la page de documentation de Microsoft.
- Appareil mobile avec une puissance de calcul limitée : si l’appareil que vous utilisez pour exécuter Spatial Workplace ne dispose pas d’une puissance de calcul élevée, il se peut que l’expérience de suivi AR ne soit pas fluide.
- Appareil photo de mauvaise qualité de l’appareil mobile : Une mauvaise qualité de suivi peut également se produire si la qualité de l’appareil photo de votre appareil est faible.
- Mauvais formats de marqueurs : Les marqueurs doivent être imprimés exactement à la taille indiquée dans le PDF du marqueur. Des tailles de marqueur incorrectes entraînent un mauvais suivi de position, car l’appareil photo perçoit que le marqueur est, par exemple, plus éloigné si le marqueur est imprimé plus petit.
- L’analyse de la pièce peut être utile : si le flux de travail est utilisé dans la même pièce uniquement, il peut être utile de numériser et d’apprendre la pièce à l’HoloLens. Cela peut être fait en tapotant dans l’air dans toutes les directions de la pièce lors de l’utilisation de l’HoloLens en mode veille (activé, mais aucune application en cours d’exécution).
- Marcher sur de grandes distances/Tourner beaucoup : il est possible que les hologrammes et les épingles soient égarés lorsque l’utilisateur marche sur de grandes distances avec l’appareil alors que l’application Frontline Spatial est en cours d’exécution ou si le flux de travail nécessite de nombreux virages à 90 degrés de la part de l’utilisateur. Un moyen de remédier à cela pourrait être d’ajouter des marqueurs au milieu du flux de travail pour réinitialiser le suivi AR / les positions des épingles.
- Mauvais placement du marqueur dans le monde réel : il est important que le marqueur soit exactement placé/collé à la même position dans le monde réel qu’il a été défini dans la scène virtuelle dans l’éditeur spatial. Cela permet de placer correctement les objets et de les suivre, alors assurez-vous que la position réelle du marqueur correspond à celle à l’intérieur de l’éditeur spatial.
- Appareil mobile à faible consommation d’énergie : si l’appareil que vous utilisez pour exécuter Spatial Workplace ne dispose pas d’une puissance de calcul élevée, il se peut que l’expérience de suivi AR ne soit pas fluide.