Nachdem Sie ein Modell geladen haben, können Sie dem Workflow Informationen hinzufügen. Um zu definieren, wo das Model später in der Spatial Workplace-App angezeigt wird, muss dem Workflow eine Spatial Referenz hinzugefügt werden.
Es gibt drei Arten von Referenzen:
- Markers
- Object trackers
- Model placement
Hinweis: Verschiedene Arten von Spatial Referenzen in einem Arbeitsablauf gleichzeitig zu verwenden wird derzeit nicht unterstützt.
Markers
Ein Marker dient dazu, Informationen, die innerhalb eines Workflows angezeigt werden sollen, an der gewünschten Stelle über dem realen Bauteil zu positionieren. Dazu muss mindestens ein virtueller Marker im Editor hinzugefügt werden, an dem sich der reale Marker in Bezug auf die reale Komponente befindet. Unterschiedliche Geräte verwenden unterschiedliche Arten von Markern. Das virtuelle Modell wird dann entsprechend der gescannten Position des Markers in Spatial Workplace geladen.
Es gibt folgende Arten von Markern:
- ArUco Marker: Diese Art von Marker ist für die Verwendung mit mobilen Geräten (iOS und Android) gedacht. Die Größe des Markers kann vom Benutzer angepasst werden und kann zwischen 1 und 99 cm liegen. Als Faustregel gilt, dass Marker mit einer Größe von 10 cm (12 cm mit Rändern) oder 15 cm (18 cm mit Rändern) verwendet werden sollten, wobei der Anwender die Möglichkeit hat, die Größe zu wählen, die am besten zum jeweiligen Bauteil passt.
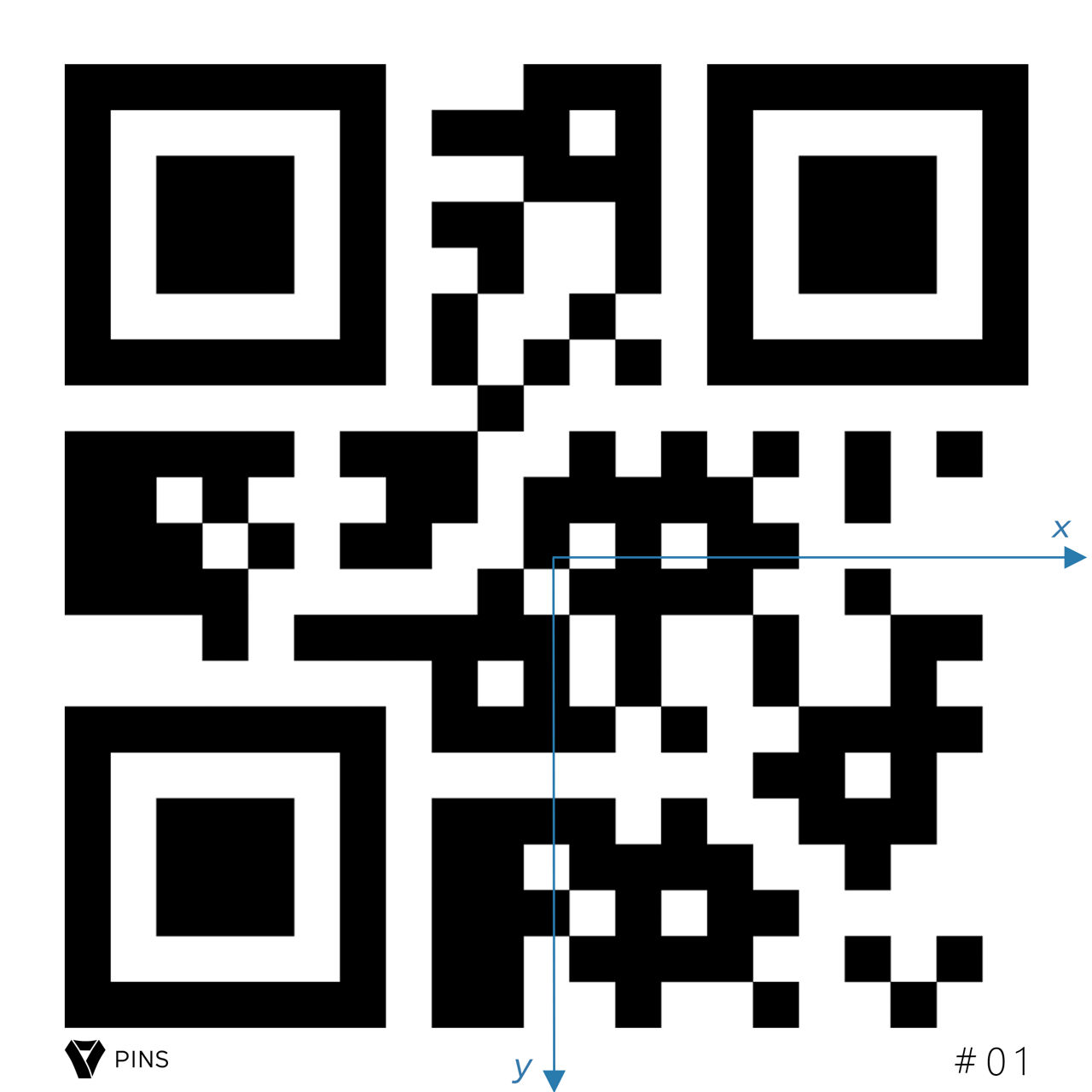
- QR code marker: Diese Art von Marker ist für die Verwendung mit einer HoloLens 2 vorgesehen. Auch hier kann die Größe vom Benutzer angepasst werden. Der vorgeschlagene Standardwert beträgt 15 cm (17 cm mit Rändern).
So fügen Sie Ihrem Modell einen Marker hinzu:
- Klicken Sie oben auf Add.
- Wählen Sie je nach Ihren Anforderungen entweder ArUco oder QR code marker.
- Klicken Sie auf die Oberfläche des Modells, an der Sie es platzieren möchten. Die anderen Optionen/Schaltflächen des Editors sind deaktiviert, bis Sie den Marker setzen.
- Um die Position des Markers auf der Oberfläche des Modells zu ändern, wählen Sie ihn aus und klicken Sie im oberen Menü auf Object > Snap oder drücken Sie
Sauf der Tastatur. - Ändern Sie die Position und Drehung von Markern unabhängig von der Oberfläche des Modells, indem Sie die Transformation Gizmos oder das Menü Transform auf der rechten Seite verwenden.
6. Auf der rechten Seite können Sie die Referenz des Markers (ID und Größe) bearbeiten.
Hinweis: Die virtuelle Markierung, die im Editor verwendet wird, muss mit der realen Markierung übereinstimmen, die bei der Verwendung von Spatial Workplace auf der realen Komponente platziert wird, also stellen Sie sicher, dass die Markierungs-ID übereinstimmt. Es ist wichtig, den richtigen Marker zu drucken und ihn sowohl virtuell im Editor als auch auf dem realen Baustein an der gleichen Stelle zu platzieren.
Alle Marker können heruntergeladen werden, indem Sie im oberen Menü auf Marker PDF klicken. Bei großen Modellen wird empfohlen, mehr als einen Marker hinzuzufügen, um die Nachverfolgung mit HoloLens 2 zu erleichtern. Ein großes Modell ist ein Modell, bei dem der Benutzer, um alle Pins zu sehen, seinen Blickwinkel um mehr als 90 Grad in Bezug auf die Position des ursprünglichen Markers bewegen muss. Wenn dies der Fall ist, fügen Sie jedem Abschnitt (d. h. der Seite) Ihrer realen Komponente eine zusätzliche Markierung hinzu. Jeder Marker hilft dem Gerät, die Position der Stifte neu zu kalibrieren und ihre korrekte Platzierung sicherzustellen.
Object Tracker
Bei der Verwendung von Object Trackern wird anhand des realen Objekts die Position der Informationen berechnet, die innerhalb eines Workflows an der gewünschten Stelle angezeigt werden sollen. Object Tracker können in Workflows verwendet werden, die auf HoloLens 2-, iOS- und Android-Geräten angezeigt werden.
So fügen Sie Ihrem Modell einen Object Tracker hinzu:
- Klicken Sie im Menü oben in der 3D-Szene auf Add > Object Tracker .
- Sie sehen ein rotes Hologramm einer Datenbrille (Sie müssen mit dem Scrollrad Ihrer Maus herauszoomen). Dieses Hologramm zeigt, wie das Objekt durch die Smart Glasses wahrgenommen wird.
3. Die Position des Object Trackers in Bezug auf das Modell in der Scene stellt die Position und Entfernung dar, in der der Benutzer sein Gerät positionieren muss, um das reale Objekt zu scannen, während er den Workflow in Spatial Workplace abspielt.
4. Fügen Sie den Object Tracker hinzu. Sie wird nun automatisch dort positioniert, wo sich die 3D-Scene Camera befindet (d. h. die Perspektive, in der der Benutzer das Modell in der 3D-Szene gerade betrachtet).
Hinweis: Mit der Maus kann der Benutzer die Scene drehen, um sie aus verschiedenen Perspektiven besser zu sehen.
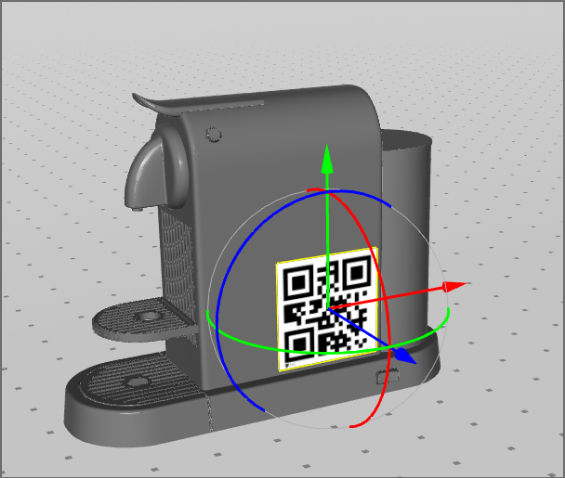
5. Verwenden Sie das Gizmo über dem Object Tracker, um seine Positionen zu verfeinern oder die Kamera zu bewegen.
6. Optional: Klicken Sie im Menü auf der rechten Seite auf Set Transform From View, um es wieder in Ihre Ansichtsperspektive zu verschieben.
Hinweis: Es ist wichtig, dass sich der Object Tracker in einem angemessenen Abstand zum Modell befindet und dass die Linie, die von ihm ausgeht, auf das Modell zeigt.
⇒ Testen Sie nach dem Hochladen Ihres Workflows die Scanperspektive und -entfernung auf einem Anzeigegerät und stimmen Sie sie im Editor ab. Auf diese Weise wird dem Endbenutzer ein besseres Scan-Erlebnis garantiert.
Hinweis: Die rote Farbe des Hologramms der Datenbrille bedeutet, dass keine .obj Datei angehängt ist. Die .obj Datei unterstützt die Objektverfolgung von VisionLib, um die reale Komponente zu verfolgen.
7. Um eine .obj Datei aus der Szene zu erstellen, wählen Sie das rote Hologramm aus
8. Gehen Sie zu den Einstellungen auf der rechten Seite.
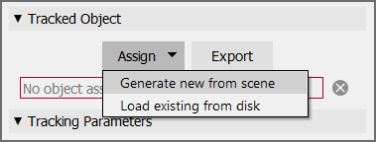
9. Klicken Sie unter Tracked Object auf Assign > Generate new from scene
10. Optional: Der Benutzer kann die .obj Datei auch auf seinem Computer speichern, indem er auf Export klickt und die Datei speichert.
Hinweis: Unabhängig vom Modellformat, das in den Spatial Editor importiert wird, muss eine .obj Datei aus der Scene generiert oder von der Festplatte bereitgestellt werden.
11. Nun sollte das Hologramm des Object Trackers in der 3D-Szene seine Farbe auf grün ändern.
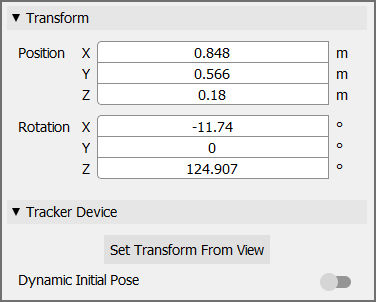
12. Optional: Wenn Teile in Spatial ausgeblendet oder aus dem Modell verschoben werden, muss die .obj Datei neu generiert werden, um diese Änderungen in Ihren Arbeitsablauf einzubeziehen. Um die Position und Drehung des anfänglichen Trackings bei Verwendung der Workplace-App anpassen zu können, aktivieren Sie die Option Dynamic Initial Pose
Hinweis: Für die Objektverfolgung in HoloLens 2 muss der Maßstab der .obj in Metern angegeben werden. Beim Generieren der .obj aus der Szene stellt Spatial dies automatisch sicher. Wenn der Benutzer jedoch ein vorhandenes .obj mit einer VisionLib-Lizenz von einer Festplatte importiert, liegt es in der Verantwortung des Benutzers, sicherzustellen, dass die Waage in Metern angegeben ist. Bei anderen Geräten gibt es diese Einschränkung nicht.
13. Ändern Sie die Position und Drehung des Objekt-Trackers über das Menü auf der rechten Seite.
14. Klicken Sie auf Set Transform From View. Der Object-Tracker wird automatisch an die Position und den Blickwinkel der 3D-Szene verschoben.
15. Schließlich können Sie die Werte der Tracking-Parameter (siehe unten) ändern, um die Nachverfolgung für ein bestimmtes Objekt zu verbessern.
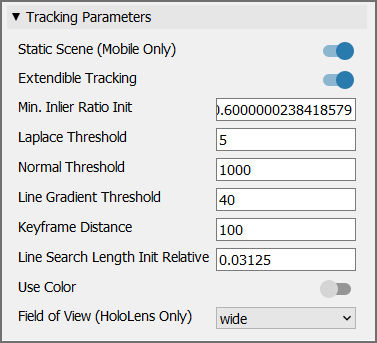
Hinweis: Einer dieser Parameter ist die Static Scene, die der Benutzer deaktivieren kann, wenn die Szene, mit der er arbeitet, dynamisch ist. Diese Funktion ist derzeit nur auf Mobilgeräten verfügbar.
Hinweis: Bei den Standardwerten handelt es sich um allgemeine Parameter, die so ausgewählt wurden, dass sie mit den meisten Objekten gut funktionieren.
Hier ist eine Liste aller verfügbaren Tracking-Parameter:
- Dynamic Initial Pose: Wenn diese Option aktiviert ist, kann der Benutzer den anfänglichen Überwachungsansichtspunkt während der Laufzeit dynamisch festlegen.
- Continuous Tracking (Mobile Only): Wenn diese Option aktiviert ist (Standardeinstellung), verfügt der Objekt-Tracker über eine kontinuierliche Objektverfolgung für mobile Geräte. Es eignet sich eher für Objekte, die während der Aufgabe verschoben oder gedreht werden können, aber ihre Form behalten. Non-continuous tracking wird das Objekt nur zu Beginn der Aufgabe verfolgt und dann mit SLAM fortgesetzt. Die nicht kontinuierliche Verfolgung eignet sich eher für Objekte, die während der Aufgabe nicht verschoben oder gedreht werden und ihre Form ändern (z. B. Teile werden hinzugefügt oder entfernt).
- Extendible Tracking: Wenn diese Option aktiviert ist (Standard), wird das modellbasierte Tracking um SLAM-basiertes Tracking erweitert. So kann das Tracking auch dann fortgesetzt werden, wenn das Modell nicht mehr im Kamerabild zu sehen ist. Der Benutzer muss einen SLAM-Tanz ausführen, was bedeutet, dass die Kamera verschoben und gedreht wird, damit genügend Grundlinie für die Merkmalsrekonstruktion vorhanden ist.
- Min. Inlier Ratio Init: Schwellenwert für die Überprüfung der Nachverfolgung während der Initialisierung. Der Wertebereich reicht von 0,5 bis 0,9, wobei 0,6 der Standardwert ist. Höhere Werte werden empfohlen, wenn das Linienmodell perfekt mit dem realen Objekt übereinstimmt und keine Okklusion aufweist. In der Regel stimmen sie jedoch nicht perfekt überein, weshalb ein niedrigerer Wert besser funktioniert.
- Laplace Threshold: Schwellenwert für die Erstellung des Linienmodells (mm). Der Wertebereich reicht von 0,0001 bis 100000, wobei 5 der Standardwert ist. Dies gibt die Mindesttiefe zwischen zwei benachbarten Pixeln an, die als Kante erkannt werden soll.
- Normal Threshold: Schwellenwert für die Generierung des Linienmodells. Der Wertebereich reicht von 0,0001 bis 1000, wobei 1000 der Standardwert ist. Dies gibt die minimale Normaldifferenz zwischen zwei benachbarten Pixeln an, die erforderlich ist, um als Kante erkannt zu werden. In der Regel wird er auf einen hohen Wert eingestellt, da normalbasierte Linien nicht sehr zuverlässig erkannt werden können. Für bestimmte Modelle kann es jedoch sinnvoll sein, einen niedrigeren Wert zu verwenden.
- Line Gradient Threshold: Schwellenwert für Kantenkandidaten im Bild. Der Wertebereich reicht von 0 bis 256, wobei 40 der Standardwert ist. Bei hohen Werten werden nur Pixel mit hohem Kontrast als Kandidaten berücksichtigt, während bei niedrigen Werten auch andere Pixel berücksichtigt werden. Dies ist ein Kompromiss. Wenn es zu viele Kandidaten gibt, wählt der Algorithmus möglicherweise die falschen Pixel aus. Wenn nicht genügend Kandidaten vorhanden sind, haftet das Linienmodell möglicherweise nicht am Objekt im Bild.
- Keyframe Distance: Mindestabstand zwischen den Keyframes (mm). Der Wertebereich reicht von 0,001 bis 100000, wobei 100 der Standardwert ist. Das Linienmodell wird nur für bestimmte Keyframes generiert. Höhere Werte verbessern die Leistung, gehen aber mit geringerer Präzision einher (und umgekehrt).
- Line Search Length Init Relative: Länge der orthogonalen Suchzeilen (in Prozent) relativ zur minimalen Auflösung während der Initialisierung und Verfolgung. Der Wertebereich reicht von 0,00625 bis 1, wobei 0,03125 der Standardwert ist. Der modellbasierte Tracker projiziert das 3D-Linienmodell in das Kamerabild und sucht nach Kantenpixeln, die orthogonal zu den projizierten Linien sind.
- Use Color:: Diese Option ist standardmäßig deaktiviert. Wenn diese Option aktiviert ist, werden farbige Kanten beim Tracking besser unterschieden. Es ist nur für Objekte mit farbigen Kanten nützlich. Es kann die Tracking-Qualität erhöhen, erfordert aber mehr Rechenleistung.
- Field of View (HoloLens 2 Only): Ein größeres Sichtfeld lässt das Objekt während der Bildaufnahme kleiner erscheinen. Es wird empfohlen, für große Objekte "breit" und für kleine Objekte "schmal" zu verwenden.
Hinweis: Object Tracking muss von TeamViewer/VISCOPIC aktiviert werden. Eine zusätzliche Lizenzierung pro Modell oder pro Gerät ist erforderlich (externer Softwareanbieter - VisionLib).
Model Placement
Beim Model placement wird die Benutzerposition beim Start von Spatial Workplace verwendet, um alle Modelle und Pins zu positionieren, die mit der Spatial Referenz verbunden sind.
Es kann in Workflows verwendet werden, die auf HoloLens 2-, iOS- und Android-Geräten angezeigt werden.
So fügen Sie eine Spatial Referenz für die Modellplatzierung hinzu:
- Klicken Sie oben in der 3D-Szene auf Add > Model Placement. Die Gizmos erlauben nur Bewegungen entlang der grünen und roten Achse und eine Drehung um die blaue Achse. Diese Einschränkung dient dazu, die Model Placement-Referenz auf derselben Ebene zu halten.
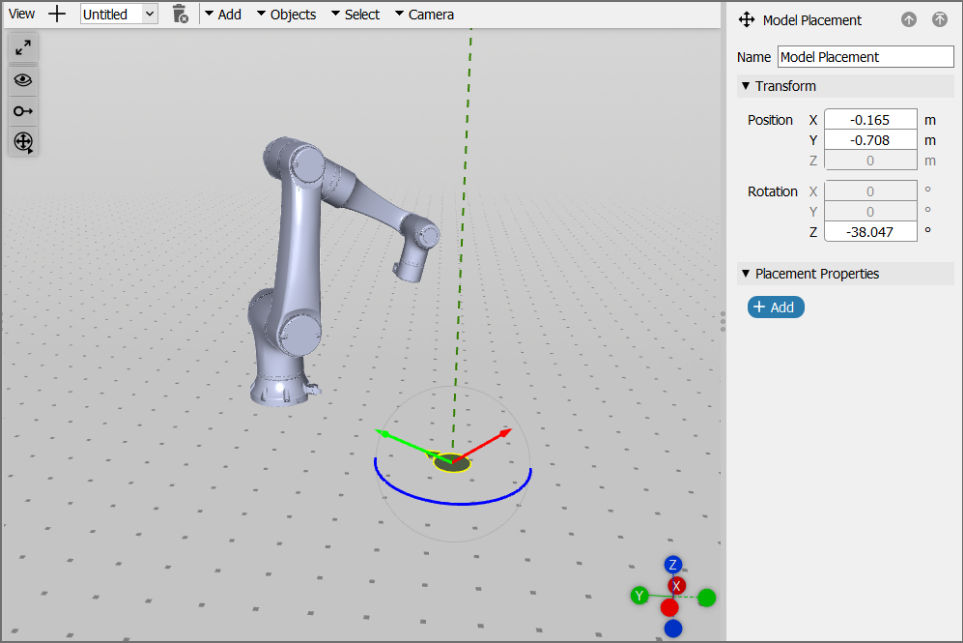
2. Der grüne Pfeil symbolisiert die Blickrichtung des Benutzers. Der Benutzer kann im Menü auf der rechten Seite auswählen, welche Modelle entsprechend dieser Referenz positioniert werden. Beim Starten des Workflows in Spatial Workplace werden die ausgewählten Modelle und verbundenen Pins in Bezug auf die Blickrichtung des Benutzers positioniert, wenn dieser die Spatial Workplace-App startet.
Model visibility: Im Gegensatz zu den Pins, die mit einer Spatial Referenz verbunden sind, sind Modelle standardmäßig nicht sichtbar. Um sie während der Wiedergabe des Workflows sichtbar zu machen, müssen Sie entweder:
Tracking-Empfehlungen
Größe der Marker
Die Größe des Markers kann die Genauigkeit beeinflussen, mit der Informationen in Spatial Workplace angezeigt werden, und auch die Entfernung, aus der der Marker gescannt werden kann. Der Editor ermöglicht es dem Benutzer, eine Markergröße zwischen 1 und 99 cm zu wählen.
Auf einem HoloLens-Gerät kann ein Frontline-Marker bequem aus einer Entfernung gescannt werden, die 50-mal größer ist als die Größe des Markers. So kann beispielsweise ein 10-cm-Marker bei guten Lichtverhältnissen bis auf ca. 5 Meter Entfernung gescannt werden. Erwägen Sie, die Markierungsgröße bei schlechten Lichtverhältnissen zu erhöhen. Auf iOS- und Android-Geräten kann Frontline ein Marker bequem aus einer Entfernung gescannt werden, die 5-mal größer ist als die Größe des Markers (z. B. ein Marker mit einer Größe von 10 cm aus einer Entfernung von 50 cm).
Hinweis: Im Allgemeinen beträgt die empfohlene Mindestgröße für einen Marker 10 cm. Dies kann jedoch je nach Lichtverhältnissen, Kamerafokus und Entfernung von der Scannerkamera variieren.
Spatial Workplace positioniert den Inhalt eines Workflows in Bezug auf den gescannten Marker.
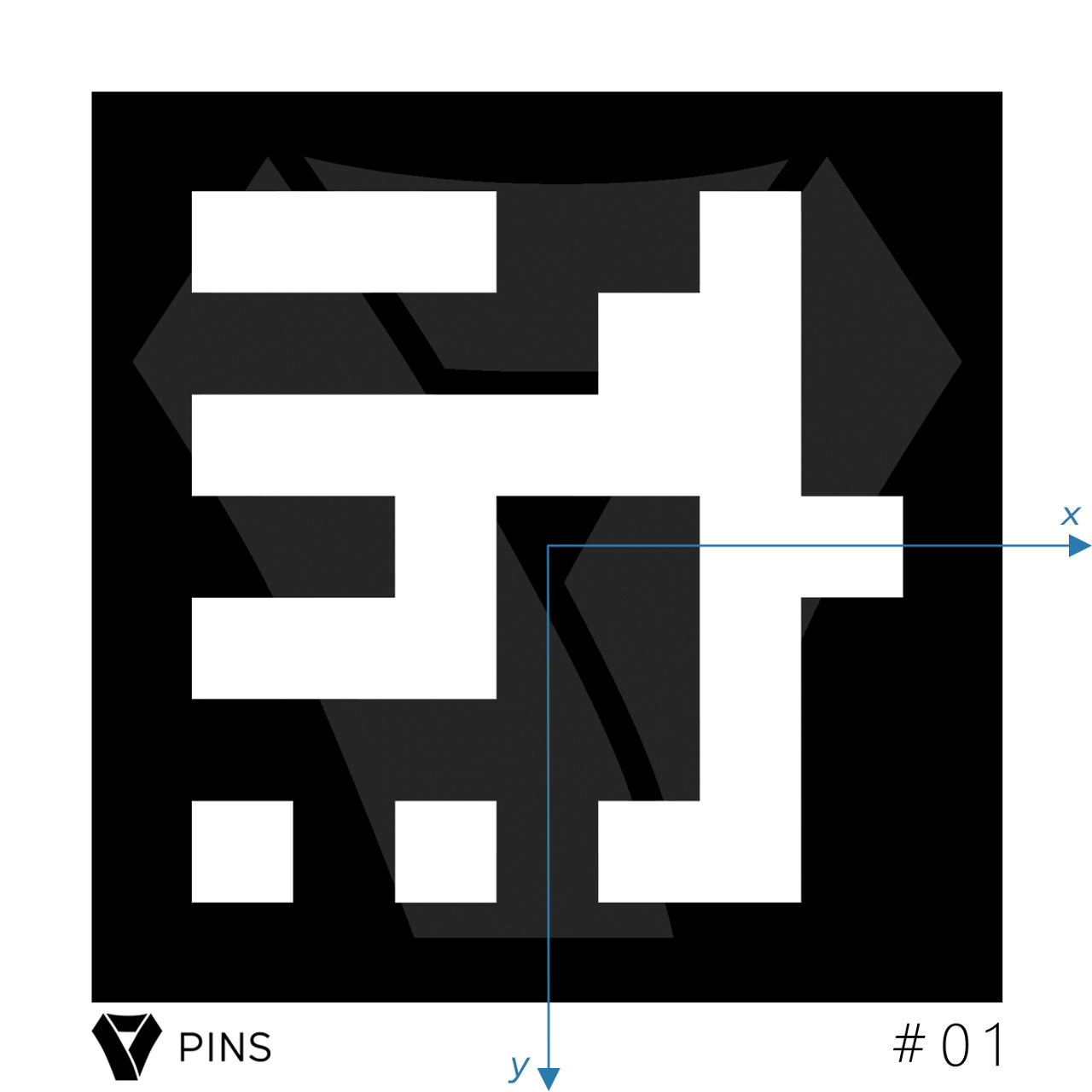
In dieser 2D-Darstellung werden nur die x- und y-Achse dargestellt. Spatial Workplace nutzt aber auch die dritte Achse, um die exakte 3D-Position abzubilden. Die Software verwendet die Mitte des Markers im Verhältnis zu seiner Höhe und Breite, um eine 3D-Transformation zu bestimmen.
Durch das Platzieren einer Markierung auf der realen Komponente, die eine andere Größe hat als die digitale, die dem Workflow im Editor hinzugefügt wurde, besteht die Möglichkeit, dass der Startpunkt dieses räumlichen Koordinatensystems an der falschen Stelle festgelegt wird. Dies kann die Positionierung aller Informationen im Workflow beeinträchtigen.
Faustregel: Eine Größe von 10 cm für ArUco-Marker und 15 cm für QR-Code-Marker reicht für die meisten Fälle auf den jeweiligen Geräten aus. Die Lichtverhältnisse, der Kamerafokus und der Abstand zur Scannerkamera können jedoch einen erheblichen Einfluss haben. Erwägen Sie, die Größe Ihrer Marker im Falle von Problemen zu erhöhen.
Hinweis: Alle vier Ecken des Markers müssen für die Scannerkamera gut sichtbar sein und auf die exakte Position abgeflacht sein, die im Editor definiert ist. Locken und Falten im Marker können die korrekte Positionierung der Stifte beeinträchtigen.
Empfehlungen für Real-Life Einstellungen
Die Berücksichtigung aller Tracking-Variablen ist wichtig, um die Pins genau an ihrer Stelle zu positionieren und den Offset zu minimieren. Dazu gehören die physischen Eigenschaften des Markers, die Umgebung und das Gerät, das zum Ausführen der Spatial Workplace-Anwendung verwendet wird. Um die bestmöglichen Ergebnisse zu erzielen, befolgen Sie die unten aufgeführten Empfehlungen, um die Effizienz der Nachverfolgung zu erhöhen.
Marker-Bedingungen:
- Verwenden Sie einen Marker mit der richtigen Größe und ID-Nummer, wie im Editor definiert.
- Alle vier Ecken sollten für die Scannerkamera gut sichtbar sein, einschließlich des weißen Bereichs um sie herum.
- Der Marker sollte immer abgeflacht und in der exakten Position auf dem realen Objekt platziert werden, ohne Locken, Risse oder Falten.
- Reflektierende Oberflächen, die den Marker bedecken, können das Tracking beeinträchtigen (z. B. Glas oder Laminierung).
- Marker sollten immer aus einem Winkel von 90 Grad in Bezug auf die Oberfläche, auf der sie platziert werden, gescannt werden (d. h. die Kamera sollte direkt auf das Objekt/den Marker gerichtet sein). Das Scannen aus verschiedenen Perspektiven kann die Positionierung von Pins beeinflussen.
Umgebungsbedingungen:
- Die Anzahl der Features in der Umgebung und die Komponente beeinflussen die Nachverfolgung. Nachdem der Marker gescannt und die ursprüngliche Position festgelegt wurde, übernimmt das Geräteverfolgungssystem die Kontrolle, um den Inhalt an seinem Platz zu halten. Die Anzahl der Funktionen in Ihrer Einstellung erhöht die Effizienz der Geräteverfolgung. Zu den guten Merkmalen gehören Ecken und Kontraste, die am Bauteil selbst und zwischen dem Bauteil und seiner Umgebung sichtbar sind.
- Der Raum sollte eine gute Beleuchtung haben. Die Kameras der Geräte haben in der Regel eine geringere Kapazität für den Empfang von Licht im Verhältnis zu unseren Augen. Stellen Sie sicher, dass genügend Licht im Raum ist, um die bestmöglichen Tracking-Ergebnisse zu erzielen. Vermeiden Sie jedoch auch zu helle Umgebungen.
- Reflektierende Oberflächen sollten vermieden werden, insbesondere zum Platzieren von Markern, Stecknadeln und anderen Inhalten.
- Brüske Bewegungen während einer Aufgabenausführung können zu Abweichungen in der Position des Inhalts führen. Halten Sie das Gerät ruhig .
- Je weiter ein Pin von der Position des gescannten Markers entfernt ist, desto größer ist die Wahrscheinlichkeit unerwünschter Abweichungen bei der Positionierung des Inhalts. Dies wird durch die Intensivierung kleiner Ungenauigkeiten bei der Markerverfolgung und durch die Menge der notwendigen Bewegung zwischen dem Marker und der Inhaltsstelle verursacht. Um dieses Problem zu minimieren, lesen Sie den Abschnitt Zusätzliche Markierungen zur Verbesserung des Trackings hinzufügen weiter unten.
Hinweis: Je nach Größe Ihrer Komponente können zusätzliche Marker erforderlich sein. Aufgrund der begrenzten Tracking-Fähigkeiten einiger Geräte kann es notwendig sein, mehrere Marker für verschiedene Abschnitte des Modells hinzuzufügen. Auf diese Weise kann die Spatial Workplace Software die Position der Pins nachverfolgen, um sie korrekt zu platzieren. Die Funktion reposition task kann jederzeit verwendet werden, wenn eine Aufgabe zur Nachverfolgung ausgeführt wird.
Geräte-Konditionen:
- HoloLens-Geräte
- HoloLens-Geräte erfordern ein sauberes Visier und Sensoren, die frei von störenden Objekten sind.
- Wenn Sie sich im Raum umsehen oder in der Umgebung herumlaufen, kann das Gerät die Einstellung des Raums besser verfolgen. Wenn sich viele Personen im Raum befinden, die ständig in Bewegung sind, kann dies die Nachverfolgung beeinträchtigen.
- Benutzer haben unterschiedliche Augenabstände (IPD). Nicht kalibrierte IPD-Werte auf dem Gerät können das AR-Erlebnis beeinträchtigen. In diesem Microsoft-Artikel wird erläutert, wie Sie eine Kalibrierungs-App verwenden, um die IPD Ihres Geräts anzupassen.
- iOS- und Android-Geräte
- Klare Kameraobjektive sind für ein korrektes Tracking notwendig.
- Der Autofokus kann die Positionierung von Pins beeinträchtigen.
Das Tracking während eines Tasks neu starten
Wenn die Position Ihres Inhalts während der Ausführung einer Aufgabe verschoben wird, scannen Sie einfach eine Markierung erneut. Wählen Sie Aufgabe neu positionieren im Aufgabenmenü des Geräts und scannen Sie die Markierung wie aufgefordert. Nach dem erneuten Scannen des Markers wird die Aufgabe genau dort fortgesetzt, wo Sie aufgehört haben.
Task menu
Auf mobilen Geräten (iOS und Android) bleibt das Task menu immer in der oberen linken Ecke des Bildschirms mit einem Symbol mit drei Zeilen. Auf HoloLens 2 wird das Aufgabenmenü angezeigt, wenn Sie die linke Hand vor das Gerät heben. Es ist auch möglich, das Tracking mit dem Sprachbefehl Reposition Task neu zu starten.
Zusätzliche Markierungen zur Verbesserung des Trackings hinzufügen
AR-Geräte haben eine bessere Tracking-Fähigkeit, wenn sich alle Pins näher an der Spatial Referenz (Marker) befinden, und erfordern nicht, dass sich der Benutzer weit entfernt oder große Drehungen in Bezug auf die ursprüngliche Position macht. Wenn der Inhalt vom der ursprünglichen Spatial Referenz entfernt ist, werden kleine Tracking-Ungenauigkeiten aus dem Markerscan größer angezeigt, da sie durch die Entfernung potenziert werden. Darüber hinaus kann eine übermäßige Benutzerbewegung zu zusätzlichen Verschiebungen in der Position des Inhalts führen.
Aus diesem Grund empfehlen wir, unterschiedliche Marker für verschiedene "Sections" des realen Bausteins zu erstellen, wie in diesem Beispiel gezeigt:
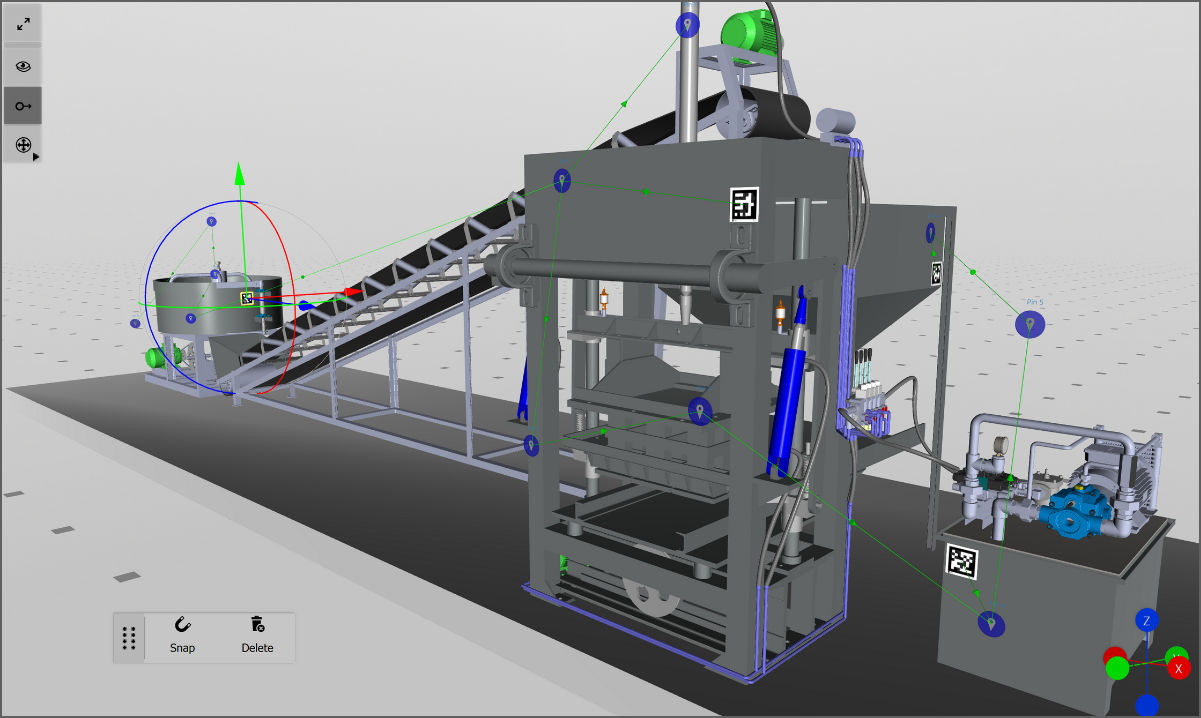
Während einer Aufgabenausführung kann der Benutzer neue Markierungen in jedem Abschnitt der Komponente scannen, und das Gerät kann die Positionen des Inhalts neu laden und die Pins an den richtigen Positionen platzieren. Weitere Informationen finden Sie im Abschnitt Das Tracking während eines Tasks neu starten oben.
Wenn Sie mehr als einen Marker zu einem Projekt im Editor hinzufügen, stellen Sie sicher, dass die zusätzlichen Marker mit den Pins im Workflow verbunden sind. Im Editor kann der Benutzer sie im 2D-Konnektor verbinden. Auf diese Weise kann der Benutzer entscheiden, ob verschiedene Marker die Aufgabe von verschiedenen Pins aus starten können oder ob die Marker zwischen den Pins hinzugefügt werden, was den Benutzer dazu zwingt, diesen Marker zu scannen, wenn er diesen Teil der Aufgabe erreicht. Sie können verschiedene Marker-IDs oder die gleiche Marker-ID für diese zusätzlichen Markierungen verwenden.
Zusätzliche Empfehlungen
Bitte berücksichtigen Sie die folgenden Elemente, um ein nahtloses AR-Tracking-Erlebnis zu gewährleisten, die Tracking-Qualität zu verbessern und Probleme wie AR-Schwimmen und falsche Positionierung zu vermeiden:
- Sehr wenige optische Merkmale in der realen Umgebung: Wenn die reale Umgebung nicht viele optische Merkmale enthält (z. B. eine einfache weiße Wand mit Textur), kann es für die Kameras schwierig sein, die Bewegungen des Headsets oder des Mobilgeräts zu berechnen.
- Sehr komplexe 3D-Modelle/Hologramme: Bei der Visualisierung komplexer Modelle oder Hologramme wird eine hohe Rechenleistung benötigt, damit alle Objekte/Teile sichtbar sind, wodurch weniger Rechenleistung für das AR-Tracking-System übrig bleibt.
- Keine Augenkalibrierung (für HoloLens-Benutzer): Die beste HoloLens-Erfahrung kann erreicht werden, wenn jeder Benutzer eine Augenkalibrierung auf dem Gerät durchführt. Wenn das Problem des "Schwimmens" auf HoloLens 2 weiterhin besteht, versuchen Sie, die Augenkalibrierung auf Ihrem Gerät auszuführen. Weitere Informationen zur HoloLens-Kalibrierung finden Sie auf der Dokumentationsseite von Microsoft.
- Mobilgerät mit begrenzter Rechenleistung: Wenn das Gerät, das Sie zum Ausführen von Spatial Workplace verwenden, nicht über eine starke Rechenleistung verfügt, kann es sein, dass das AR-Tracking nicht reibungslos funktioniert.
- Minderwertige Kamera des Mobilgeräts: Eine schlechte Tracking-Qualität kann auch auftreten, wenn die Qualität der Kamera Ihres Geräts niedrig ist.
- Falsche Markergrößen: Marker müssen genau in der Größe gedruckt werden, die im Marker-PDF angegeben ist. Falsche Markergrößen führen zu einer falschen Positionsverfolgung, da die Kamera wahrnimmt, dass der Marker z.B. weiter entfernt ist, wenn der Marker kleiner gedruckt wird.
- Das Scannen von Räumen kann hilfreich sein: Wenn der Workflow nur im selben Raum verwendet wird, kann es hilfreich sein, den Raum zu scannen und der HoloLens beizubringen. Dies kann durch Tippen in die Luft in alle Richtungen des Raums erfolgen, wenn die HoloLens im Leerlaufmodus verwendet wird (aktiviert, aber keine App wird ausgeführt).
- Große Entfernungen/Häufiges Drehen: Es ist möglich, dass die Hologramme und Pins verlegt werden, wenn der Benutzer große Entfernungen mit dem Gerät zurücklegt, während die Frontline Spatial-App ausgeführt wird, oder wenn der Workflow viele 90-Grad-Drehungen des Benutzers erfordert. Eine Möglichkeit, dies zu beheben, könnte darin bestehen, Markierungen in der Mitte des Workflows hinzuzufügen, um das AR-Tracking bzw. die Positionen der Pins zurückzusetzen.
- Falsche Platzierung des Markers in der realen Welt: Es ist wichtig, dass der Marker genau an der gleichen Position in der realen Welt platziert/geklebt wird, wie er in der virtuellen Szene im Raumeditor definiert wurde. Dies hilft bei der korrekten Platzierung von Objekten und der Verfolgung. Stellen Sie also sicher, dass die reale Position des Markers mit der Position im räumlichen Editor übereinstimmt.
- Mobilgerät mit geringem Stromverbrauch: Wenn das Gerät, das Sie zum Ausführen von Spatial Workplace verwenden, nicht über eine hohe Rechenleistung verfügt, kann es sein, dass das AR-Tracking nicht reibungslos funktioniert.